
Release note Software version 5.13.x.x
For e-Series only
Download HERE
SW 5.13.1 RELEASE NOTES
Release Versions:
- UR Software Update: 5.13.1
- URCap Software Platform:
- URCap API: 1.13.0 (no change)
- URCap SDK: 1.13.0 (no change)
- URSim Linux: 5.13.1
- URSim Virtual Machine: 5.13.1
- User Manuals: 5.13.0
- Support Log Reader: 3.16.4
Bug Fixes
Controller
Increased allowed torque of the base joint when Tool or Elbow is close to the base singularity
- Similar to older software versions, risks of clamping or collisions with the robot still should be avoided in the cylinder extending vertically from the base of the robot.
- More robust against disturbances. Less risk of false protective stops when performing base rotation movements at high speeds
- With a force limit set to the minimum value: unchanged behavior
- Increasing the force limit will gradually increase the allowed torque of the base, and thereby robustness against disturbances
- Robot is able to push with higher forces in force control in some situations (still within safety force limits)
SW 5.13.0 RELEASE NOTES
Release Versions:
- UR Software Update: 5.13.0
- URCap Software Platform:
- URCap API: 1.13.0 no change
- URCap SDK: 1.13.0 no change
- URSim Linux: 5.13.0
- URSim Virtual Machine: 5.13.0
- User Manuals: 5.13.0
- Support Log Reader: 3.14.33
Compatibility Notice
With this release, installation variables are stored in a new format to support new functionality. Due to this, installation variables will not load properly (will appear corrupted), if an installation from SW 5.13.0 is loaded on older PolyScope versions.
Note that this will occur even if the installation was not saved in SW 5.13.0, since older installation files (i.e. the .variables file) automatically will be updated to the new format when loaded for the first time (on SW 5.13.0).
It is therefore recommended to back up existing programs and installations before upgrading to SW 5.13.0.
Key Features
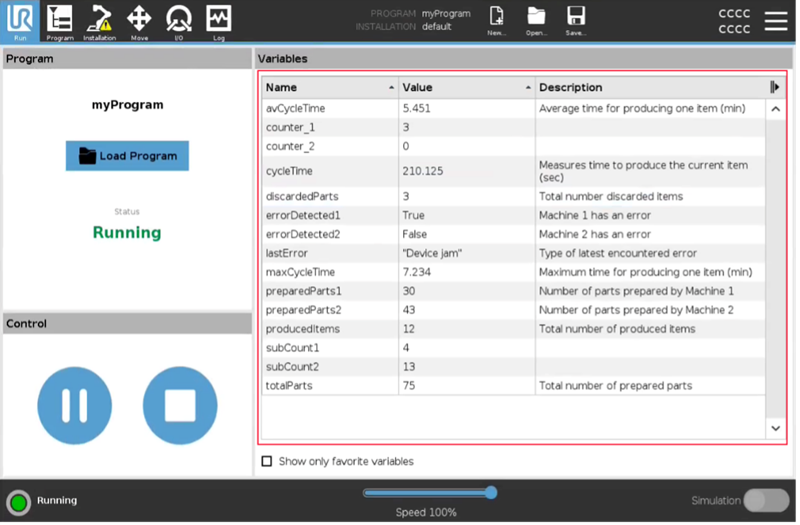
- Large play controls: Integrated large program play control buttons on the Run tab screen to make it easier for operators to press the buttons
- Support for favorite variables: On the Run tab screen, operators can now monitor a smaller list of selected variables, important for the operation of the robot application
- Support for variable descriptions: Variables can now have a description to indicate the meaning of the variable and its value, thereby making it easier for operators to understand the application state from the program's variables.
PolyScope GUI
This release is focused on improving the user experience for operators using the Run tab screen. Focus areas are integration of large program play controls and improving how the list of variables of running programs are presented.
Large program play controls on Run tab screen
The Run tab screen has been extended with integrated program play controls, i.e. Play/Pause/Resume and Stop buttons. The buttons are large to make them easy to press for operators, even when wearing gloves.
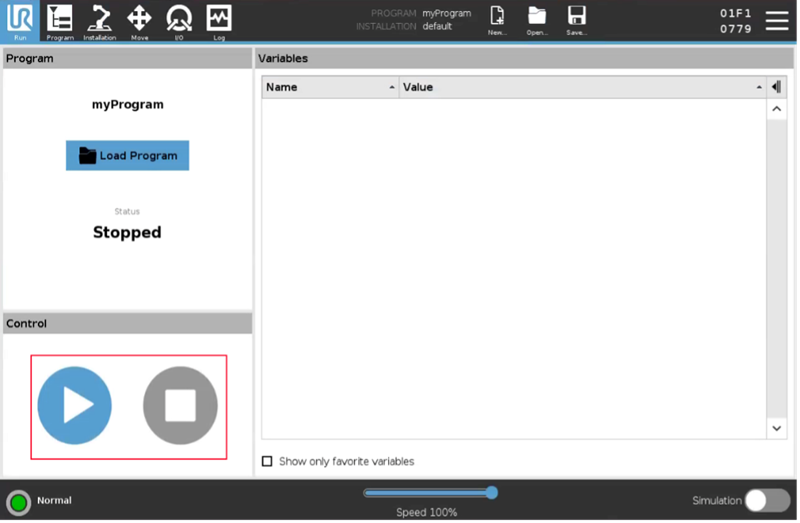
The new Control panel with program play controls replaces the Robot Age panel from previous PolyScope versions. Robot age is still saved to the log file and can be read using the UR Log Viewer.
Note that the program play control buttons in the PolyScope footer are no longer visible while on the Run tab screen (the footer play controls are, however, still available from other screens).
Support for favorite variables
By default, a list of all program variables and installation variables used by a running program are displayed on the Run tab screen and on the Variables tab (in the Program tab screen). Now, it is also possible to show a list of selected variables by using the new option to only show favorites variables on these screens.
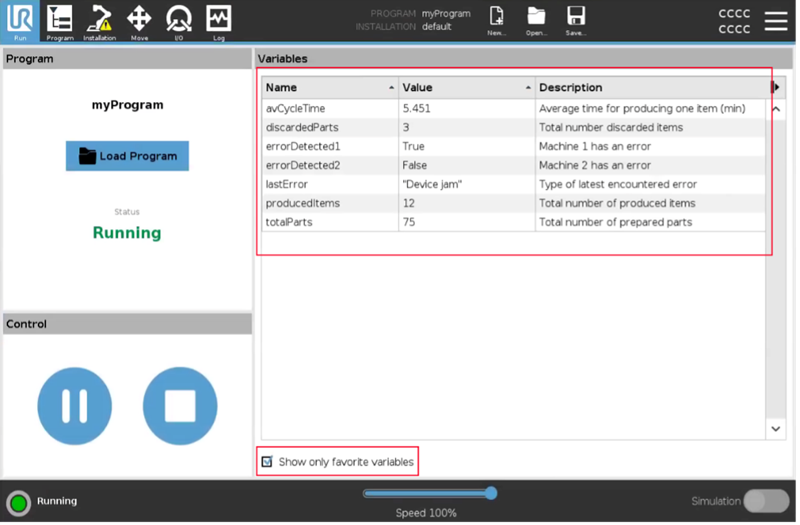
This new filtering option allows operators using the Run tab screen to only focus on monitoring a small list of important variables relevant for operating the robot application.
It is possible to designate both program variables and installation variables as favorites.
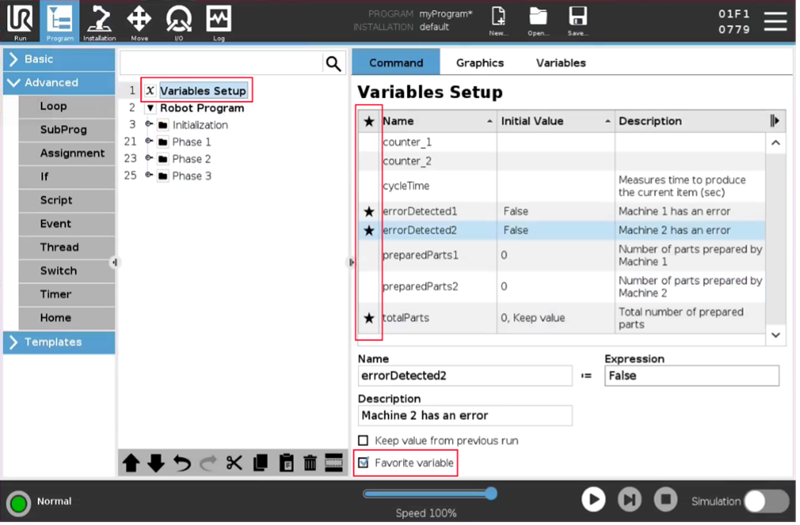
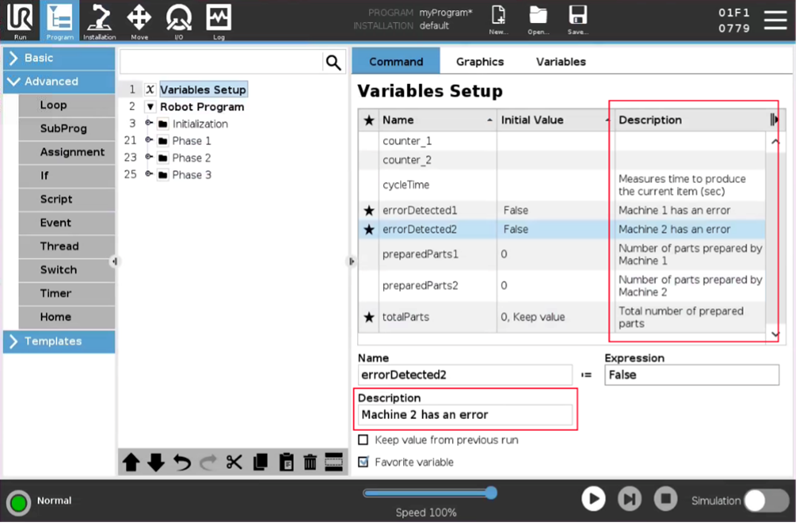
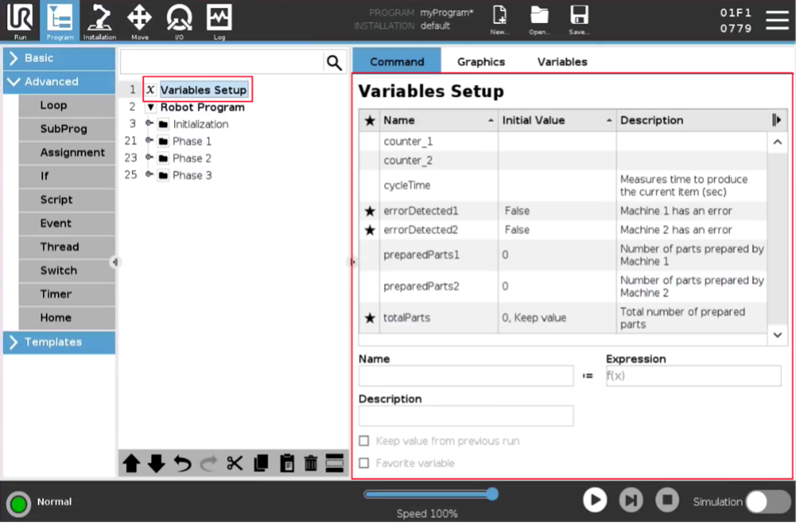
The new Variables Setup node can be used for designating favorite program variables.
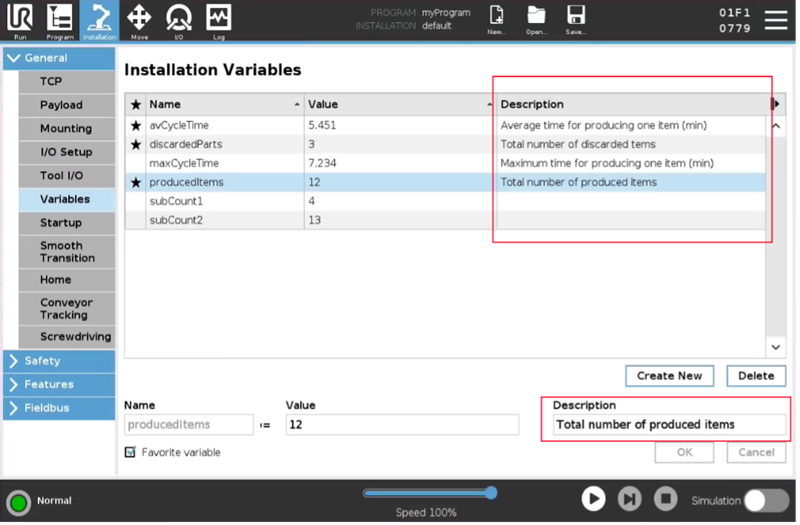
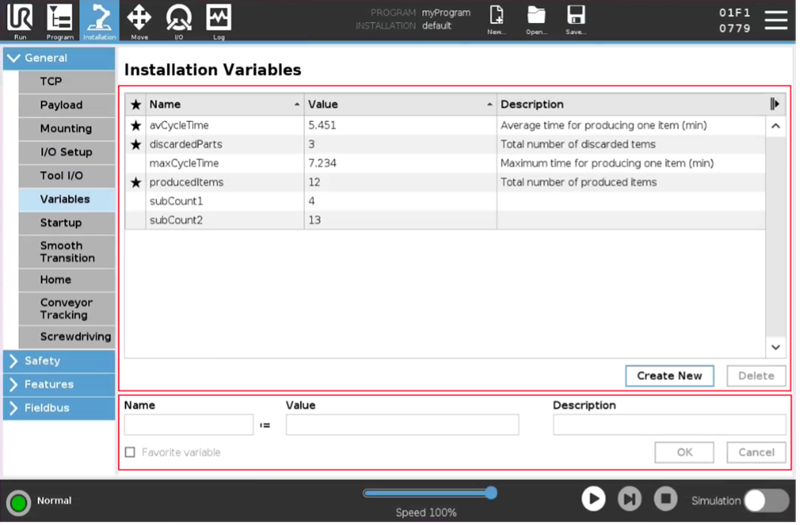
An installation variable can be designated as a favorite variable on the Installation Variables screen.
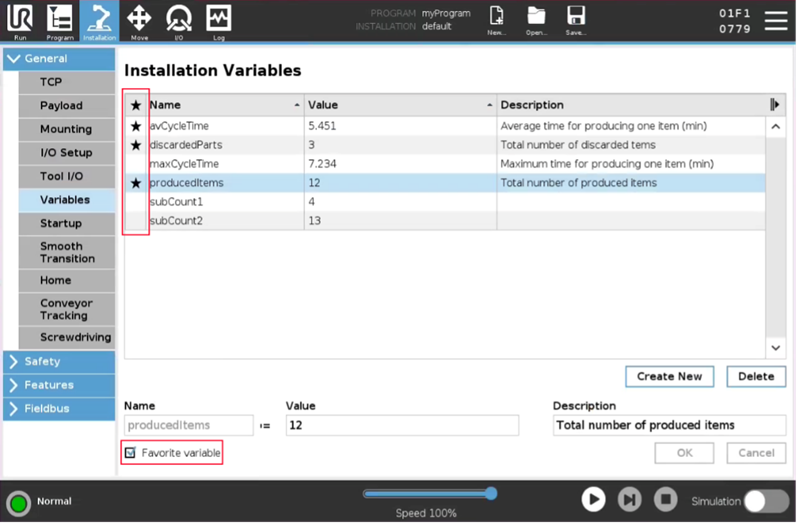
Designating a favorite variable allows the variable to be part of the set of favorite variables displayed when the user selects to only show favorite variables on the Run tab screen or the Variables tab.
The leftmost column in the variables list on the Installation Variables and the Variables Setup node screen indicates whether a variable is a favorite, and it is possible to order the list accordingly by tapping the header of the column.
Note that variables defined in script code (including Waypoint script variables) cannot be designated as favorite variables.
Support for variable descriptions
This release provides the possibility to add an optional description to program variables and installation variables with a length of up to 120 characters. The description can be used to convey the purpose of the variable and/or the meaning of its value to operators using the Run tab screen and/or other programmers.
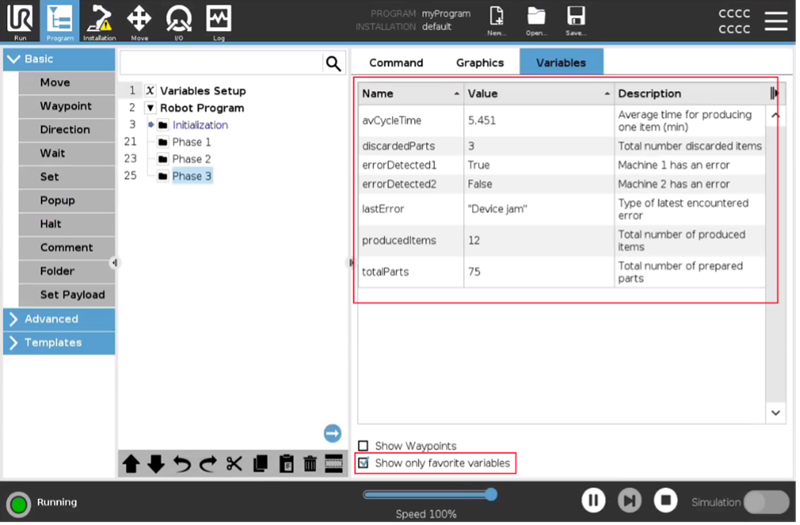
The description of a variable (if a description has been specified in the program or installation) is displayed in the Description column in the variables list on the Run tab screen and the Variables tab.
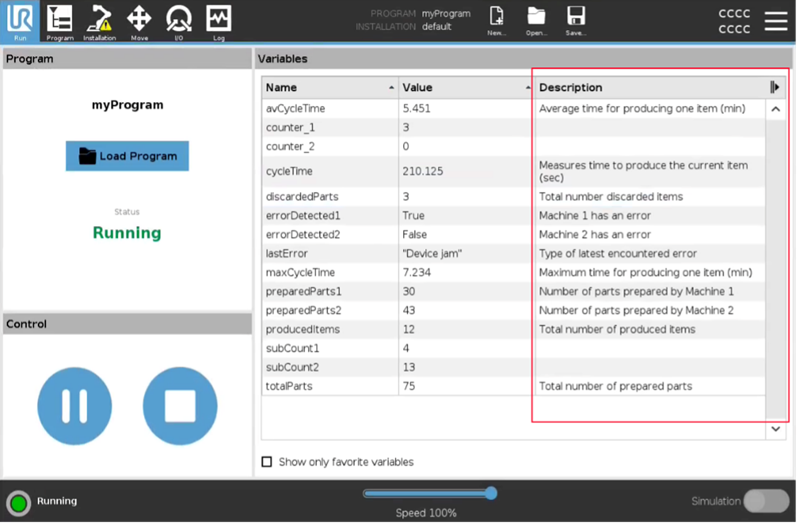
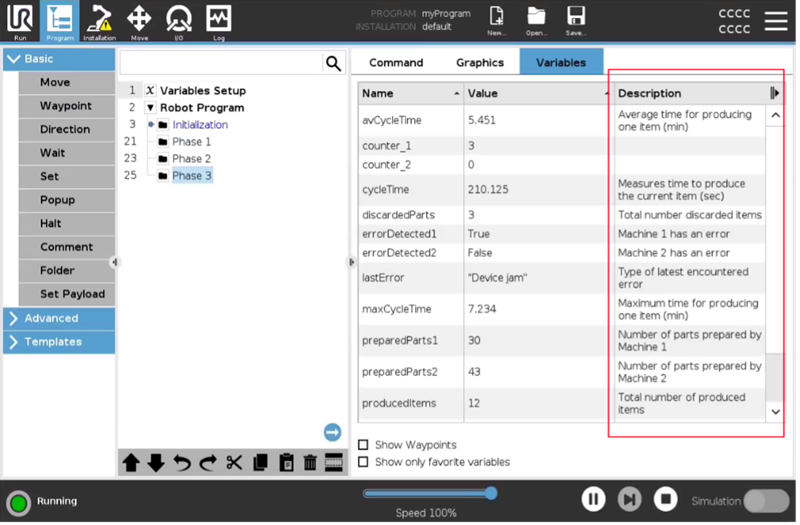
A variable description will span multiple lines to fit the width of the Description column if necessary.
The new Variables Setup node can be used for adding a description to program variables.
The Installation Variables screen has been extended with the ability to specify descriptions for installation variables.
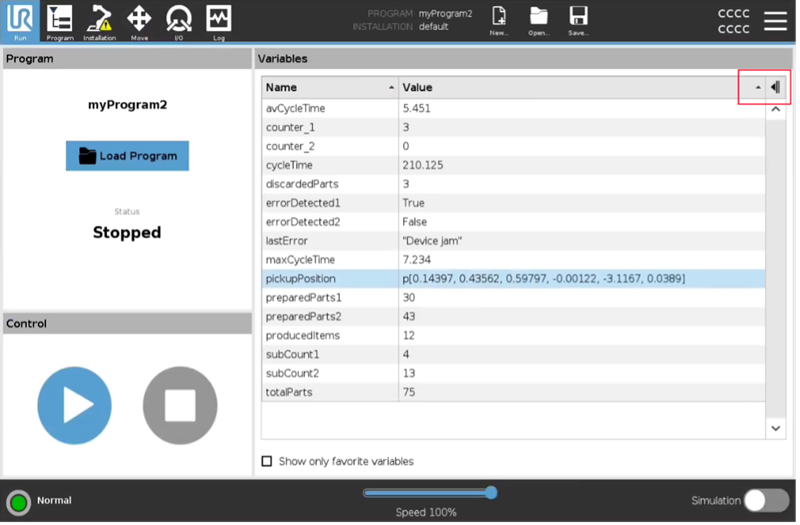
It is possible to hide all variable descriptions in a variables list by collapsing the Description column, which will give more space for the Value/Initial Value column. This can, for instance, be useful for fully viewing a "large" variable value, e.g. a pose, or if visibility of the variable descriptions is not needed.
Variable descriptions can be hidden on all screens with a variables list, i.e. the following screens:
- Run tab
- Variables tab
- Installation Variables
- Variables Setup node
Improved display of variables lists
The layout of variables lists has been improved and aligned to provide a better and unified overview of variables. This includes variables lists on the following screens:
- Run tab
- Variables tab
- Installation Variables
- Variables Setup node
The Show Waypoints option has been removed from the Run tab screen to simplify the screen for operators, since this option is typically only used by programmers. Note that this option is still available on the Variables tab.
On the Run tab and Variables tab screens, it is now possible to highlight a specific variable of interest by tapping the corresponding row (which will highlight the row in light blue). This can be useful for monitoring the value of a specific variable.
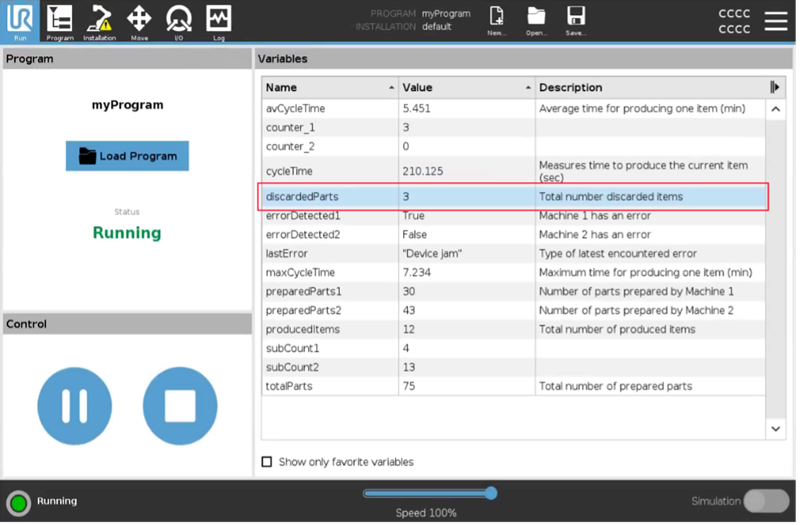
The selection will remain (also after changing screens and while the program is running) until another row is tapped or the selection is cleared by tapping the selected row again.
Improved configuration of variables
This release comes with UI improvements on screens for creating/editing installation variables and editing properties of program variables.
Program variables
The Init Variables node has been replaced by the new Variables Setup node.
In addition to the existing functionality of the old Init Variables node, the new Variables Setup node offers the option of configuring new program variable properties. With the new node, it is possible to:
- Assign a variable an initial value (existing functionality)
- Rename a variable (existing functionality)
- Add a variable description
- Designate a variable as a favorite variable
The new node has an improved layout and workflow for editing the properties of program variables, and it is permanently visible as the first node in the Program Tree.
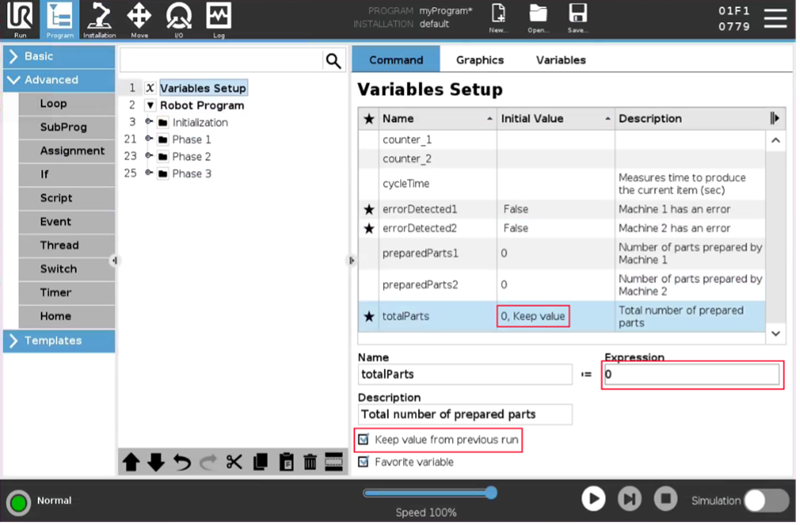
When the Keep value from previous run option is enabled and an initial value is defined, both options are indicated in the Initial Value column in the variables list.
Installation variables
The layout of the Installation Variables screen has been improved. The screen also introduces a new workflow where the properties of an installation variable can be modified by editing input fields.
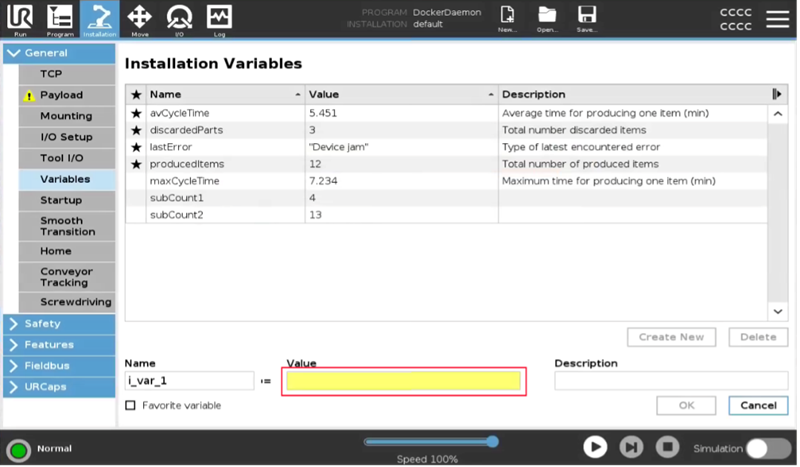
When creating a new installation variable, an empty Value field is now highlighted with a yellow background to indicate that it is mandatory to specify an initial value for the new variable.
QR code for Help
The built-in PolyScope help (accessible through the Hamburger menu) has been replaced with a new Help screen with a single QR code pointing to https://help.universal-robots.com, in order to improve compatibility across PolyScope versions and ensure up-to-date help content. The online-based user manuals can be accessed for online browsing by scanning the QR code.
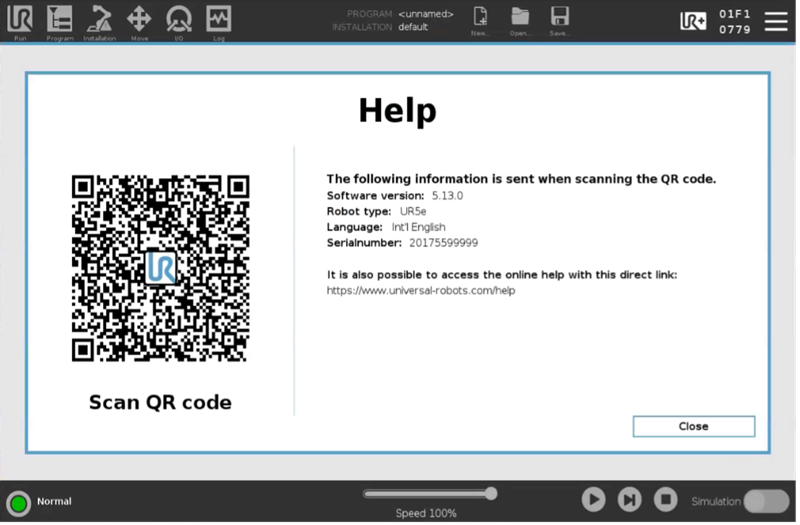
The new Help screen replaces the previous local context-based PolyScope help on the robot (the clickable red question marks) which is no longer available.
Note that by scanning the QR code, system-specific information, like software version, robot type, language, and serial number are sent along, to provide a customized experience (the specific transferred information is stated on the Help screen). If this is not wanted, the direct link can be used instead.
About screen
Viewable End User License Agreement (EULA)
It is now possible to read the software End User License Agreement (EULA) in PolyScope. The EULA can be reviewed under the Legal section in the About screen.
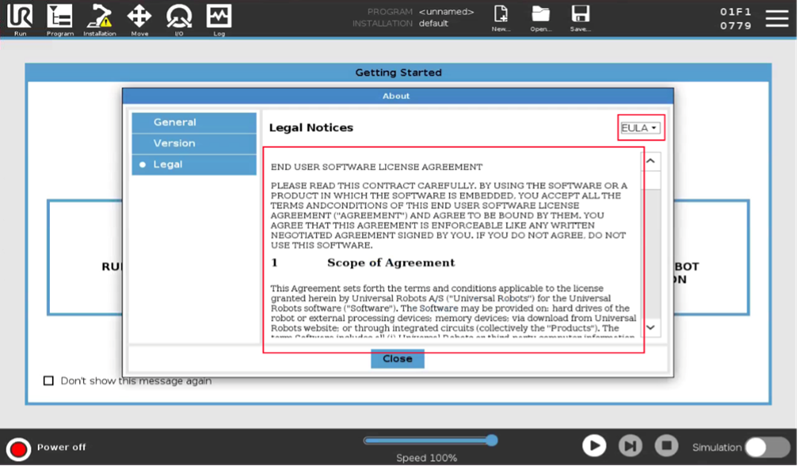
Note that in this release, the software EULA is only available in English.
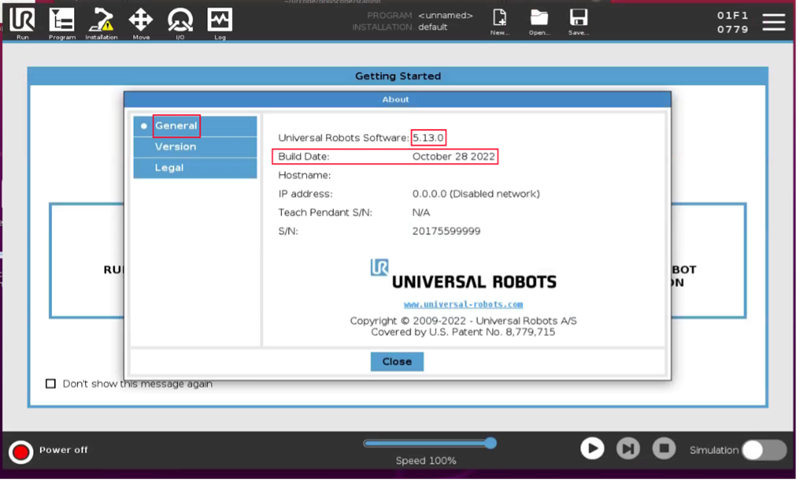
General
The Version tab has been renamed to General.
The "Universal Robots Software" field now only displays the software version number instead of the longer string from previous software versions, e.g. "URSoftware 5.12.4.1101661 (Aug 31 2022)".
The build date is displayed in a new separate Build Date field instead of being part of the software version shown in the "Universal Robots Software" field.
Dashboard Server
The Dashboard Server remote control interface has been extended with the new version command which returns the version of the UR Software running on the robot. The new command returns a string with the version number, e.g. "5.13.0".
The version command can be used as a replacement for the existing polyscopeVersion command whose return value is a string with the complete version information from the About screen from previous PolyScope versions, e.g. "URSoftware 5.12.0.1101319 (Mar 22 2022)".
The old polyscopeVersion command is still available to ensure backward compatibility.
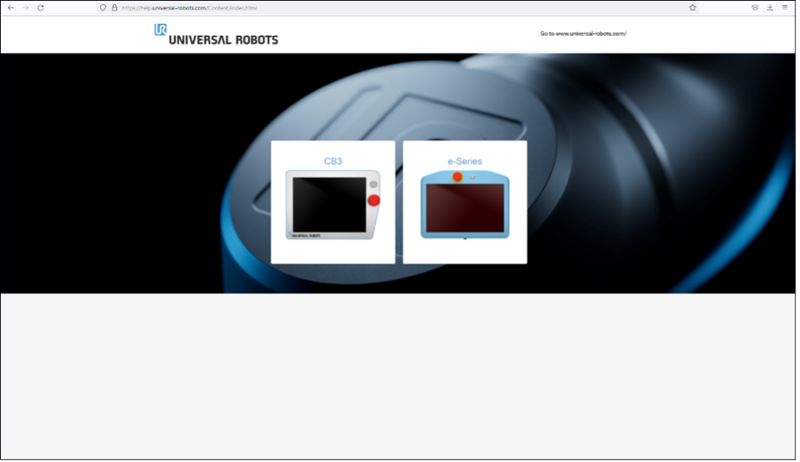
User Assistance
Online Help
This release is accompanied by the introduction of the online-based user manuals available at https://help.universal-robots.com.
Existing user manuals are now available for online browsing.
Bug Fixes
PolyScope
- Fixed issue where the Three Position panel under Safety in the installation was not translated for non-English languages
- Fixed issue where the dialog displayed, when attempting to change the Operational Mode from the PolyScope header while Operational Mode was controlled by PROFISafe, would falsely indicate that Operational Mode was controlled by a safety input. The dialog text has been changed from "Unable to change operational mode. It is currently controlled by the operational mode safety input." to "Unable to change operational mode. It is currently controlled by the PROFIsafe operational mode".
- Fixed issue where it in some situations could take a long time before a newly installed URCaps would appear in the Active URCaps list in the URCaps Settings screen after installing the URCap.
- Screwdriving node:
- Fixed issue where enabling the Enable Starting Point option, in some situations, would insert a MoveL node with a Waypoint where it was not possible to change the type (from Fixed) and the Waypoint appeared linked. This could occur with a new Screwdriving node, if the Program Tree contained two (or more) Screwdriving nodes where the enabled starting point had a variable Waypoint.
- Replaced the regular onscreen keyboard with the Expression Editor keyboard as input method to the expression field used when the Follow the screw using Expression option is enabled
- Fixed issue where there was no transition animation in the Robot Status panel on the Initialize screen while the robot was brake releasing (Robot Active → Brake Release / Brakes Released → Robot Operational / Robot in Normal Mode)
- Fixed issue where toggling a digital tool output in the I/O tab while the robot arm was powered off would appear to have no effect in PolyScope, but would unexpectedly take effect when the robot arm was powered on. Now, toggling the tool output will be ignored when the robot arm is powered off.
- Fixed issue where it was possible to assign an I/O action (e.g. Freedrive) and a Safety Function (e.g. 3-Position Enabling Device) to the same Configurable I/O. Any existing assigned I/O action will now be removed when assigning a Safety Function to a Configurable I/O.
- Fixed issue where the variables table in the Variables tab and Run tab was not cleared after creating a new program.
URCap Software Platform
- Fixed issue where wrong parameter ranges and default values for registered capabilities, in some situations, would be used by existing Gripper nodes after creating a new installation. This could occur in multi-gripper URCaps which dynamically adjust their gripper capabilities (observable in the Dynamic Multi-Gripper URCap sample).
previous RELEASE NOTES:
- Release Notes Software Version 5.12
- Release Notes Software Version 5.11
- Release Notes Software Version 5.10
- Release Notes Software Version 5.9
- Release Notes Software Version 5.8
- Release Notes Software Version 5.7
- Release Notes Software Version 5.6
- Release Notes Software Version 5.5
- Release Notes Software Version 5.4
- Release Notes Software Version 5.3
- Release Notes Software Version 5.2
- Release Notes Software Version 5.1