
Release note Software version 5.1.x.x
For e-Series only
Note: Software cannot be downgraded to an older version after upgrading to software 5.1
The first release note is placed at bottom of this and describes the most important improvements from version 5.0.x.x to 5.1.x.x
The latest software version is at the top of this article.
RELEASE NOTES 5.1.2 - 10/10-2018
Released Versions
- UR Software: 5.1.2
- URSim: 5.1.2
- URSim Virtual Machine: 5.1.2
- Robot Image: 5.1.2
Summary of updated content regarding this release:
- User Manual
- Script Manual
- Offline Simulator
- Robot Image Software
- Robot Software
- Support Log Reader
BUG FIXES
POLYSCOPE GUI:
- Improve program loading time
RELEASE NOTES 5.1.1 - 01/10-2018
Released Versions
- UR Software: 5.1.1
- URSim: 5.1.1
- URSim Virtual Machine: 5.1.1
- Robot Image: 5.1.1
Summary of updated content regarding this release:
- User Manual
- Script Manual
- Offline Simulator
- Robot Image Software
- Robot Software
- Support Log Reader
BUG FIXES
Controller
- Adjusted error message for communication issues between the Control Box and joints.
PolyScope GUI:
- Adjusted password requirement for installation file
- Enabled the possibility of a single Waypoint in a Feature Plane Wizard to be edited
- Translation improvements for: French, Norwegian, German. Spanish, Italian, Korean, Dutch, and Portuguese languages
RELEASE NOTES 5.1 - 03/09-2018
Released Versions
- UR Software: 5.1.0.40195
- URCap Software Platform:
- URCap API: 1.4.0
- URCap SDK: 1.4.4
- URSim: 5.1.0
- URSim Virtual Machine: 5.1.0
- Robot Image: 5.1.0
- Manual: 5.1.0
- Support Log Reader: 3.6.86
Summary of updated content regarding this release:
- User Manual
- Script Manual
- Offline Simulator
- Robot Image Software
- Robot Software
- Support Log Reader
Note: Full feature list for URCap can be found in the release notes and new SDK can be found on the develop forum.
Key Features
- MoveJ Commands: Enabled MoveJ commands to be defined relative to an installation feature similar to MoveP and MoveL
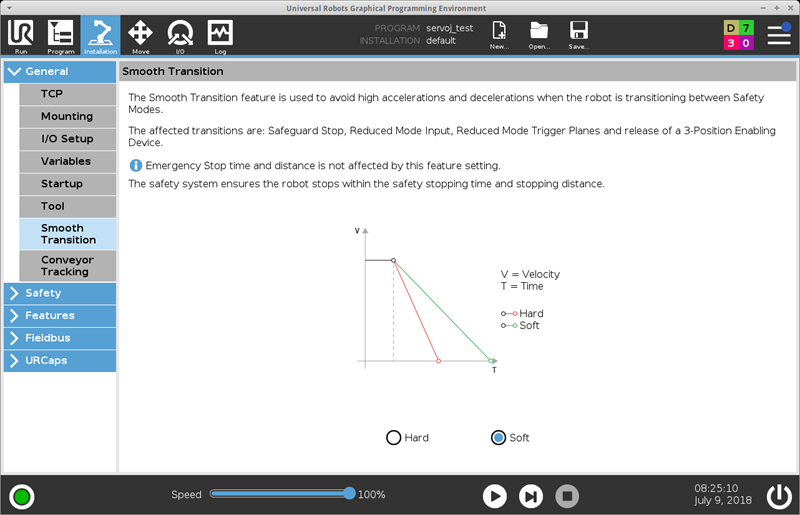
- Smooth Transition: Enabled a smoother transition between safety modes
- URCap API: Made URCap API more supportive of naming 'Waypoint' program nodes
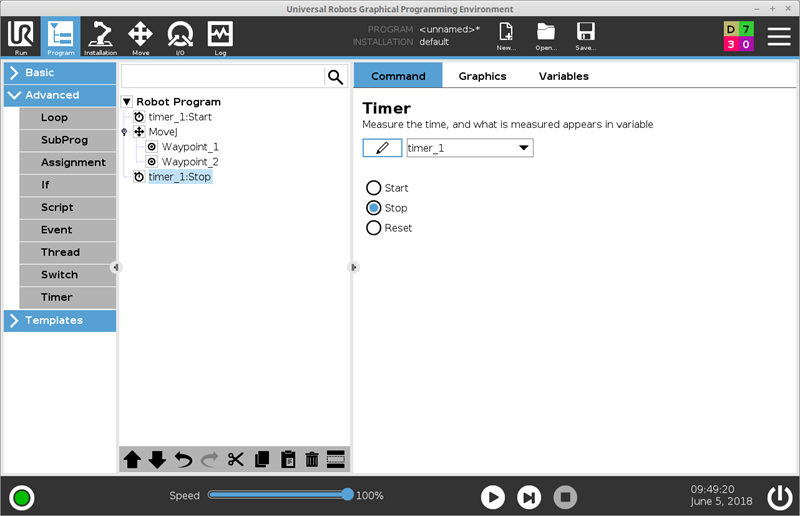
- Timer: Created a program node to measure the time spent in different sections of a program
- Blend improvements: Updated MoveJ and MoveL blend algorithms
Backwards Compatibility
- Due to changes in MoveL and MoveJ blend algorithms, the robot trajectory and timing may change when loading existing programs.
PolyScope GUI
- Renamed the "Use Tool Flange" to "Ignore Active TCP" in the TCP drop-down menu when on a Move Mode.
- Added a "Show Waypoints" checkbox to enable or disable the listing of Waypoint Variables on the Run Screen and the Variables Tab.
- Enabled robot movement to softly transition when switching between the safety modes (i.e., Normal Mode, Reduced Mode, and Safeguard Stop).
- Added I/O actions for configurable Inputs/Outputs which were previously only available for standard Inputs/Outputs.
- Enabled unhandled Java exceptions in Swing-based URCaps to show a detailed dialog with information about the responsible URCap, including a section showing the stack trace from the exception in the URCap code. The dialog box is limited to specific PolyScope versions. In rare cases, this dialog does not appear and PolyScope reverts to showing the "standard" unhandled exception dialog with a stack trace without indicating the responsible URCap.
- Enabled PolyScope to visualize all blends.
- Enabled the ability to add a blend radius to a Fixed Waypoint next to Relative Waypoint.
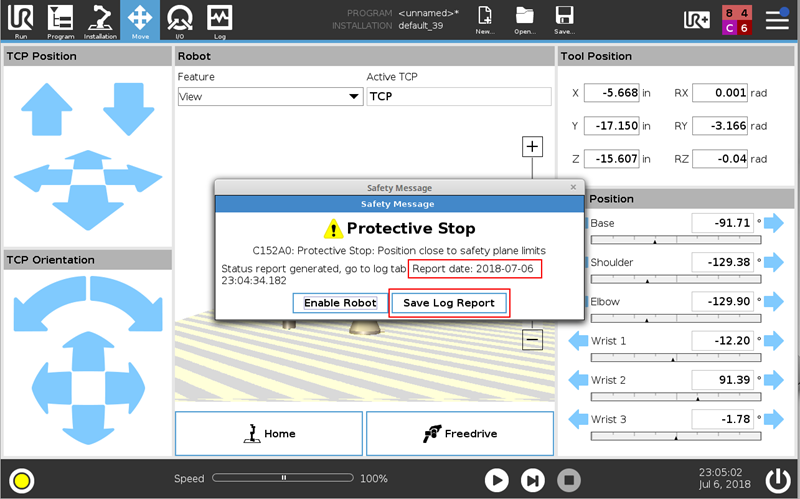
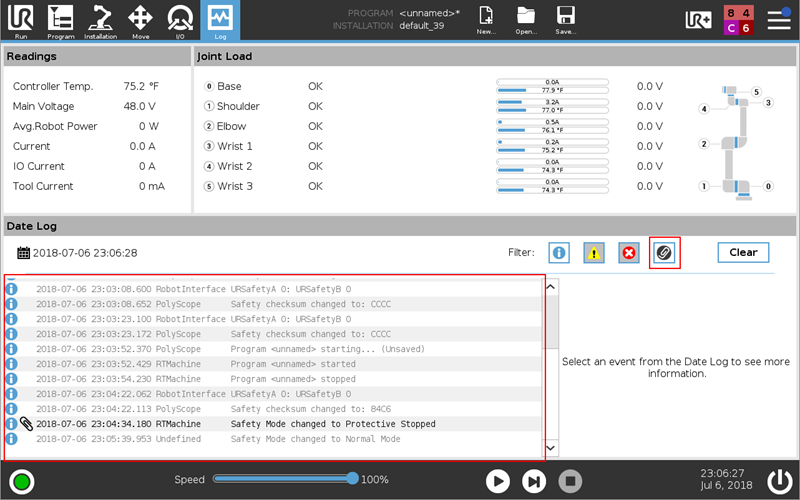
- Added a filter for log entry attachments in the Log Tab and a quick jump feature when Incident Reports are created. The 'Save Report As' button corresponding to the log entry is now disabled until the Incident Report is fully generated and ready to be saved.
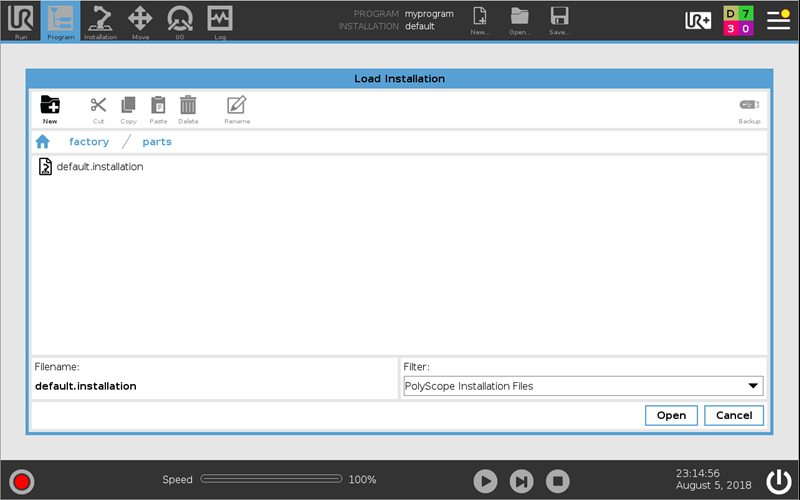
- Improved the File Manager user experience.
- Added a 'Timer' node which measures the time spent in different sections of a program.
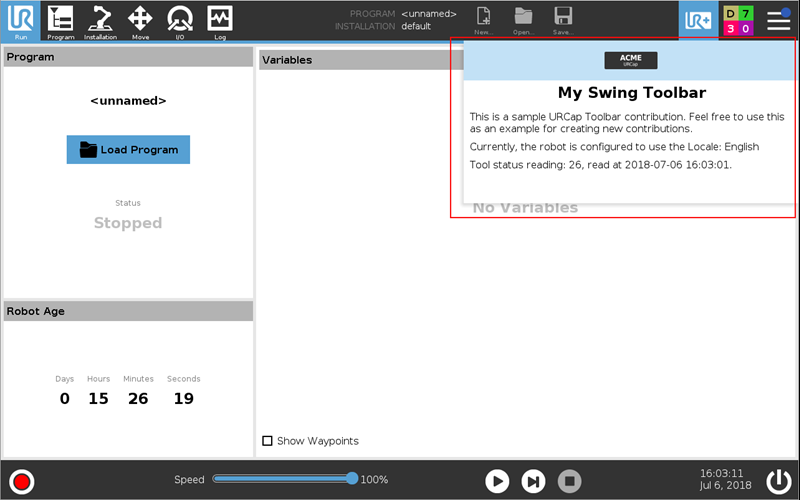
- Improved the appearance of the URCap toolbar where contributions are displayed. Replaced the panel border with a drop shadow.
Script
- Made Waypoint poses and Joint angles accessible as variables in the script generated by PolyScope.
- Added a script function, get_steptime(), that returns the single robot step time in seconds.
- Added a script function, get_target_payload(),that returns the weight of the payload in kilograms.
- Added a script function, get_target_payload_cog(), that returns the coordinates of the center of gravity of the active payload in meters.
- Enabled stand-alone expressions to send a syntax error.
- Added a script function set_configurable_digital_input_action().
- Added a script function set_safety_mode_transition_hardness().
URCaps Software Platform
URCaps API
- Provided support for naming Waypoint nodes:
- See the new 'createWaypointNode(String)' method provided by the 'ProgramNodeFactory' API interface in the 'program' domain Java package.
- Introduced a new method, 'createMoveNodeNoTemplate()', in the 'ProgramNodeFactory' interface. This method creates a Move node with a non-default configuration. This means the resulting Move node does not contain a single Waypoint child node. This method can be used for applications where a Move node with a default configuration is not needed, such as in situations where all the child Waypoint nodes should have custom names.
Note: At least one Waypoint child node must be under a Move node for the Move node to be valid.
- Updated Javadoc with more details regarding:
- 'DataModel' API interface: All 'set(...)' methods
- 'TreeNode' API interface: All methods that manipulate the sub-tree (i.e., the methods 'addChild(ProgramNode)', 'insertChildBefore(TreeNode, ProgramNode)', 'insertChildAfter(TreeNode, ProgramNode)', and 'removeChild(TreeNode)').
- All "set(...)" methods in API interfaces for built-in PolyScope program nodes.
- 'ContributionProvider' API interface: Javadoc for the 'get()' method now specifies when the method should be called.
- Javadoc for the following methods now states that an 'IllegalStateException' exception is thrown if the methods are called outside an 'UndoableChanges' scope in URCaps with Swing-based UIs:
- 'KeyboardNumberInput'/'KeyboardTextInput' API interfaces: Javadoc for all 'show(...)' methods now mention the 'JComponent' (Swing GUI component) passed to the method must be visible on the screen.
URCap SDK
- Updated the Ellipse and Ellipse Swing URCap samples to demonstrate how to assign a custom name to a Waypoint node.
- Changed Loading and Copying URCap nodes:
- All modifications to the supplied non-empty data model in the constructor for installation and program node contributions are ignored during calls to the 'createNode(...)' methods in the installation and program node services in the following situations:
- When loading a program node contribution
- When loading an installation node contribution
- When a program node contribution is copied in the program tree
- This change is introduced to ensure the original node configurations are properly loaded or copied, and to align with existing behavior when loading and copying program node contributions containing sub-trees where the sub-tree generated in the node constructor is ignored and the original sub-tree is inserted instead.
- This is introduced for both HTML-based and Swing-based URCaps.
- Documented changes in the URCap tutorial (both versions) in sections "7.2: Making the Customized Installation Node Available to PolyScope" and "8.5/8.6: Loading Programs with Program Node Contribution"
- Compatibility notice: This change might affect existing URCaps that make modifications to the data model directly in the installation or program node constructor
Dual Robot Calibration
- Changed the flow of connecting robots together. Now, the calibration tool is mounted on the master before the robots move toward each other.
- Added scale results to the Dual Robot Calibration.
Dashboard Server (Full dashboard service list)
|
Command |
Return Value |
Description |
|
Restart Safety |
Restarting Safety |
Used when robot gets a safety fault or violation to restart the safety. After safety has been rebooted the robot will be in Power Off. IMPORTANT: Always ensure it is okay to restart the system. It is recommended to check the error log before using this command. |
Bug Fixes
Controller
- Fixed issue where the controller crashed when deleting MODBUS signals due to race condition.
- Fixed issue where declaring stand-alone statements whose result is not consumed in a URScript program causes incorrect behavior in the controller.
- Improved error reporting for invalid MoveP motions.
- Fixed issue where 'join' script function worked incorrectly with multiple threads. Thread synchronization when using the script command 'join' works which may affect existing programs.
- Fixed issue where controller did not detect all scenarios where a compilation error had to be thrown if the URScript statements 'break' and 'continue' were not declared within the scope of a loop.
- Fixed the MoveL blend issue where the robot did not reach the next Waypoint position if configured with a large blend radius.
- Fixed an issue where blends did not work when using the palletizing wizard.
- Fixed a MoveJ blend that caused excessive overshoot outside the blend radius.
- Fixed an issue with blends between different move types that caused discontinuities in robot trajectory.
PolyScope GUI
- Fixed an issue where a program ran even though it depended on undefined installation features.
- Fixed an issue where Program Correction model could potentially lock PolyScope.
- Fixed PolyScope path visualization when selecting a Move node or the main program, in the program tree.
- Fixed an issue where redefining a Waypoint only by changing the associated feature would not update the Waypoint.
- Fixed issue where program variables and values were not shown in the 'Variables' table in the 'Run' screen when a program was running.
- Fixed issue in the Init Variables node where the Expression text field header was not translated for non-English languages.
- Fixed issue where the Expression Editor screen was incorrectly positioned horizontally.
- Fixed issue where the paperclip icon did not appear in Log Tab for a log entry containing a generated Incident Report.
- Fixed the issue where the Pose Editor showed the real robot pose instead of the Waypoint pose when real robot pose is like the edited Waypoint pose.
- Fixed issue where the blend radius was reset to zero for variable waypoints.
- Improved description of auto-initialize function.
- Fixed issue so auto-initialize is not triggered by a MODBUS signal.
URCap Software Platform
- Fixed issue where adding a Swing JPanel to the JPanel provided by the 'buildUI()' method in the 'SwingProgramNodeView'/'SwingInstallationNodeView' API interface resulted in an "AuthorizationException: Method not supported from URCaps exception.
- Fixed issue where the first undo operation would not restore an empty data model for values with primitive data types (e.g., integer, double, etc.).
- Fixed issue related to the dialog "IllegalStateException: No node currently selected" Java exception appeared when users interacted with the Command Tab screen for a URCap node after loading a program containing URCap program nodes from at least two different URCaps.
- Fixed issue where the 'setValue(double)' method in the 'AnalogIO' API interface applied an incorrect value to the Analog Output.
Manuals
- Improved description of the "Critical Section" in the Script Manual.
- Added a new section called "Ioconfiguration" in the Script Manual which describes the set of functions used to configure different behaviors in the system through the Input/Output registers. The following functions are now documented in the Script Manual: set_standard_digital_input_action(...), set_configurable_digital_input_action(...), set_tool_digital_input_action(...), set_gp_boolean_input_action(...), and set_input_actions_to_default(...).
- Improved description of the "Auto Initialization" section in the Software Manual.
- Corrected the maximum voltage value obtained from an Analog Output pin in Current Mode in the User Manual.