
软件版本更新说明 5.13.x.x
仅e系列
从这里下载
SW 5.13.1 版本说明
发布版本:
- UR软件更新:5.13.1
- URCap软件平台:
- URCap API:1.13.0 没有变化
- URCap SDK:1.13.0 没有变化
- URSim Linux:5.13.1
- URSim 虚拟机:5.13.1
- 用户手册:5.13.0
- 支持日志阅读器:3.16.4
Bug修复
控制柜
当工具或肘部接近基座奇点时,增加基座关节允许承受的扭矩。
- 与旧的软件版本类似,在从机器人基座垂直延伸的圆柱体区域仍应避免夹持或与机器人碰撞的风险。
- 抗干扰的能力更强。在高速进行基座旋转运动时,保护性停止误发生的风险更小。
- 在力的极限设置为最小值的情况下:行为没有变化
- 增加力的限制将逐渐增加底座的允许扭矩,从而提高对干扰的鲁棒性
- 在某些情况下,机器人能够在力的控制下以更大的力推动(仍在安全力的限制之内)
SW 5.13.0 版本说明
发布版本:
- UR软件更新:5.13.0
- URCap软件平台:
- URCap API:1.13.0 没有变化
- URCap SDK:1.13.0 没有变化
- URSim Linux:5.13.0
- URSim 虚拟机:5.13.0
- 用户手册:5.13.0
- 支持日志阅读器:3.14.33
兼容性通知
在这个版本中,安装变量是以一种新的格式存储的,以支持新的功能。因此,如果在旧的PolyScope版本上加载SW 5.13.0的安装文件,安装变量将无法正常加载(会出现损坏)。
请注意,即使安装文件没有保存在SW 5.13.0中,也会发生这种情况,因为旧的安装文件(即.变量文件)在第一次加载时(在SW 5.13.0上)会自动更新为新的格式。
因此,建议在升级到SW 5.13.0之前,先备份现有的程序和安装。
关键特性
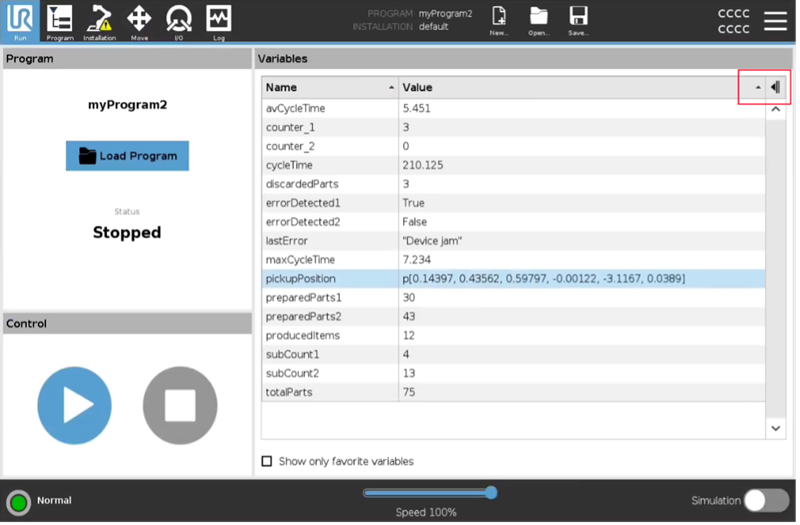
- 更大的运行控制:在运行标签屏幕上集成了更大的程序运行控制按钮,使操作人员更容易按下按钮。
- 支持喜好的变量:在运行选项卡屏幕上,操作人员现在可以监控一个较小的选定变量列表,这些变量对机器人应用的操作非常重要。
- 支持变量描述:变量现在可以有一个描述,以表明变量的含义及其值,从而使操作员更容易从程序的变量中了解应用状态。
PolyScope GUI
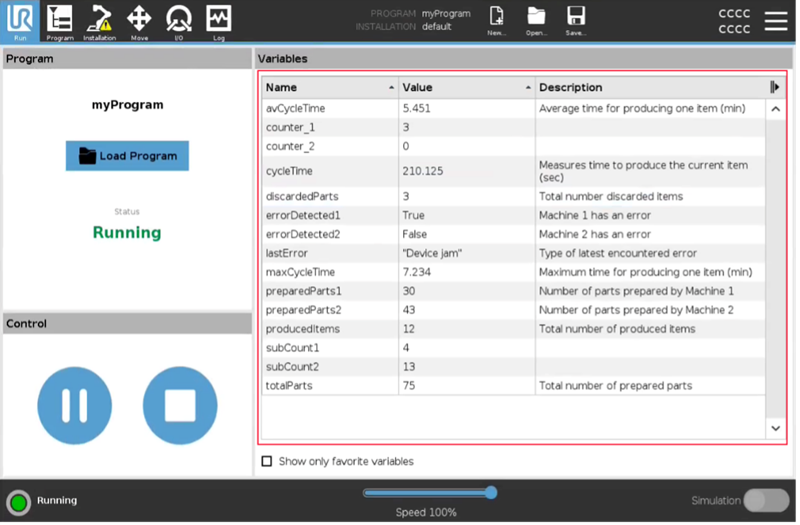
这个版本的重点是改善操作员使用 "运行 "选项卡屏幕的用户体验。重点领域是整合大型程序播放控制和改进运行程序的变量列表的展示方式。
运行选项卡屏幕上的大的程序运行控制
运行选项卡屏幕已经扩展了集成的程序运行控制,即运行/暂停/恢复和停止按钮。这些按钮很大,使操作者很容易按下,即使戴着手套也是如此。
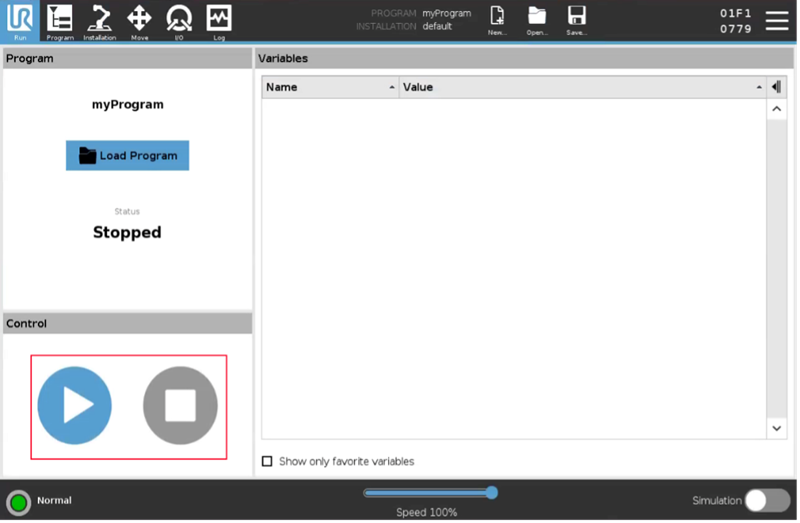
带有程序运行控制的新控制面板取代了以前PolyScope版本中的机器人年龄面板。机器人年龄仍然保存在日志文件中,可以使用UR日志查看器来读取。
请注意,PolyScope页脚的程序运行控制按钮在运行标签屏幕上不再可见(但是页脚的运行控制在其他屏幕上仍然可用)。
支持喜好的变量
默认情况下,运行中的程序所使用的所有程序变量和安装变量的列表会显示在运行选项卡屏幕和变量选项卡(在程序选项卡屏幕)上。现在,也可以通过使用新的选项,在这些屏幕上只显示最喜好的变量,来显示所选变量的列表。
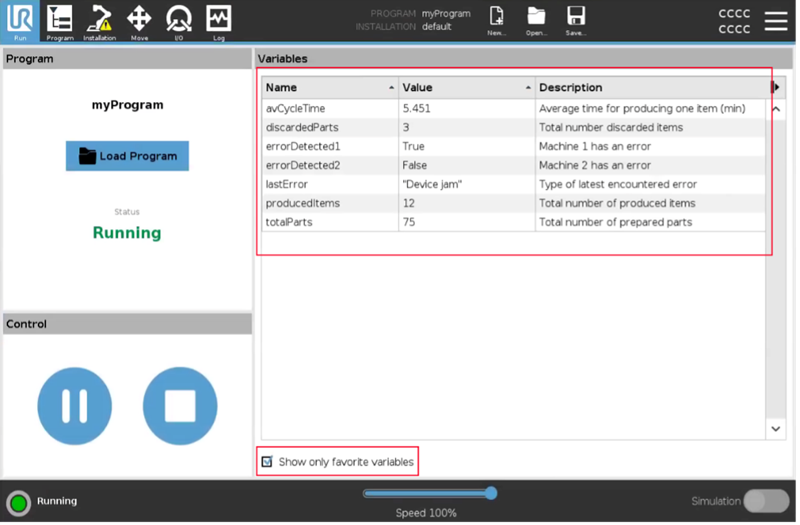
这种新的过滤选项使操作人员在使用 "运行 "选项卡屏幕时,只需关注与操作机器人应用相关的一小部分重要变量的监控。
可以将程序变量和安装变量都指定为喜好的变量。
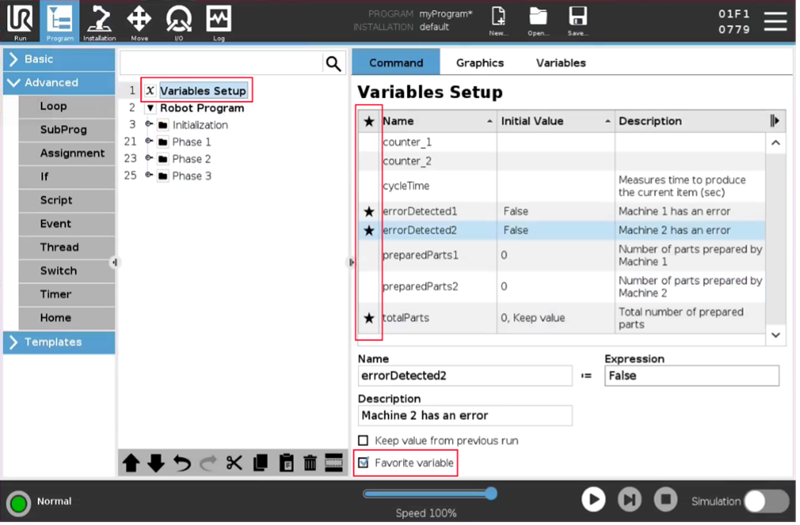
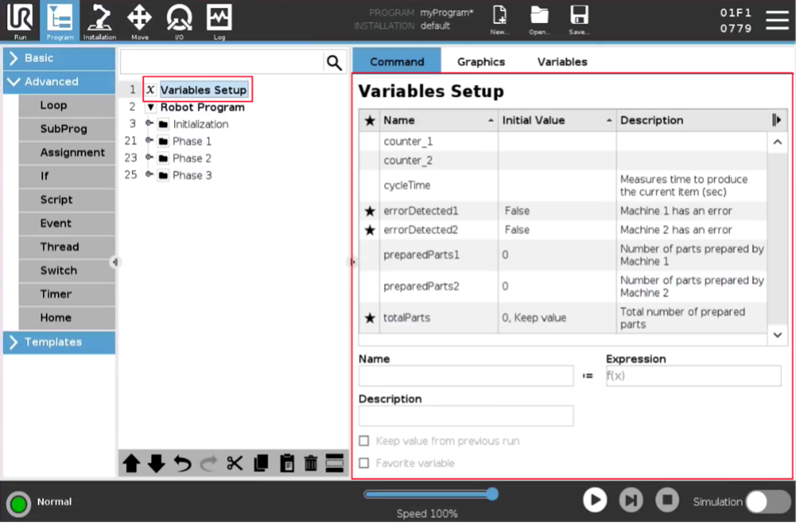
新的变量设置节点可用于指定喜好的程序变量。
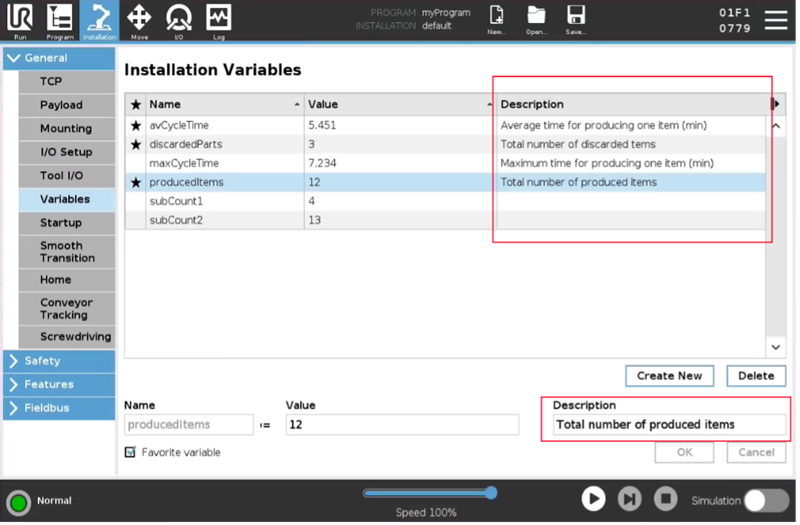
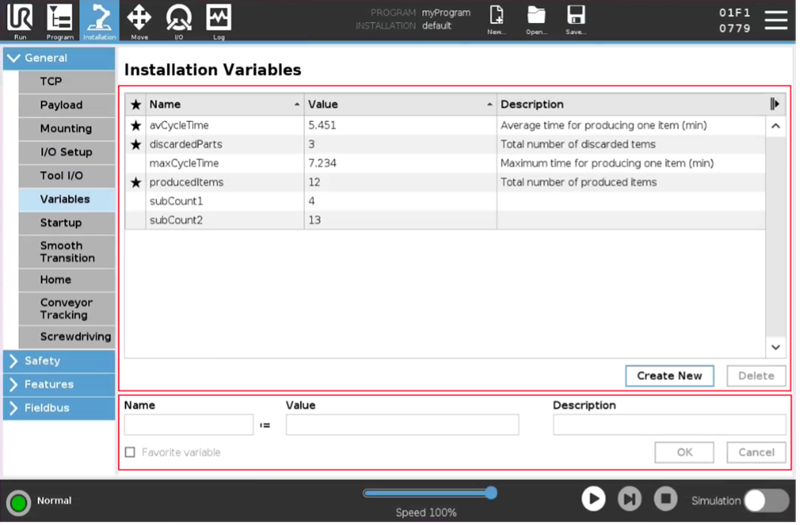
在 "安装变量 "屏幕上,一个安装变量可以被指定为喜好的变量。
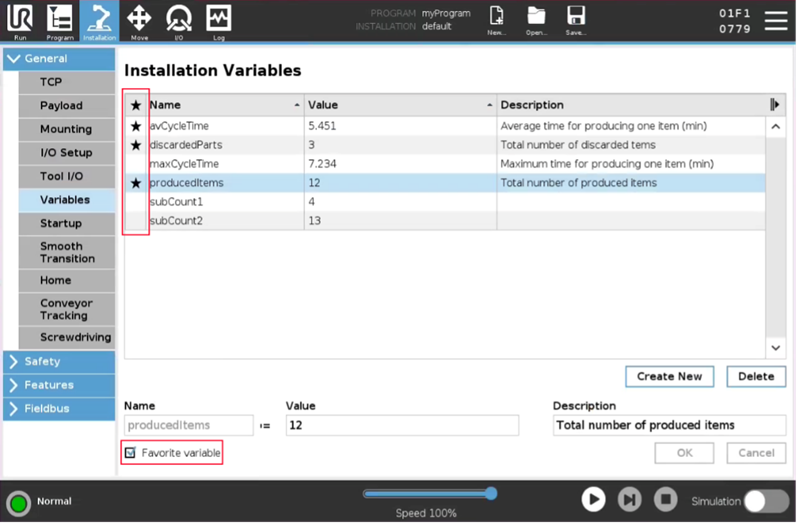
当用户选择只在 "运行 "选项卡屏幕或 "变量 "选项卡上显示最喜好的变量时,指定一个最喜好的变量可以使该变量成为最喜好的变量集的一部分。
在 "安装变量 "和 "变量设置节点 "屏幕上的变量列表中,最左边的一列表示某个变量是否是最喜好的,而且可以通过点击该列的标题对列表进行相应排序。
请注意,在脚本代码中定义的变量(包括路点脚本变量)不能被指定为最喜好的变量。
对变量描述的支持
该版本提供了为程序变量和安装变量添加长度不超过120个字符的可选描述的可能性。该描述可用于向使用 "运行 "选项卡屏幕的操作员和/或其他程序员传达该变量的目的和/或其值的含义。
变量的描述(如果在程序或安装中指定了描述)显示在 "运行 "选项卡屏幕和 "变量 "选项卡上的变量列表中的描述栏。
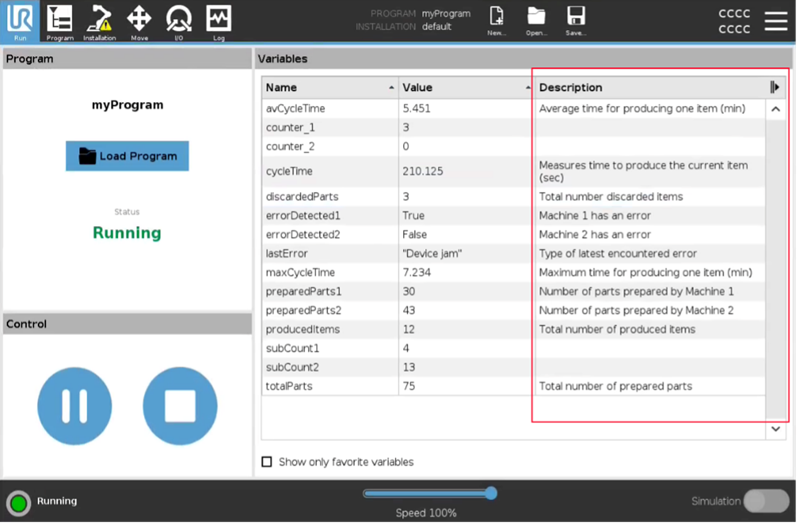
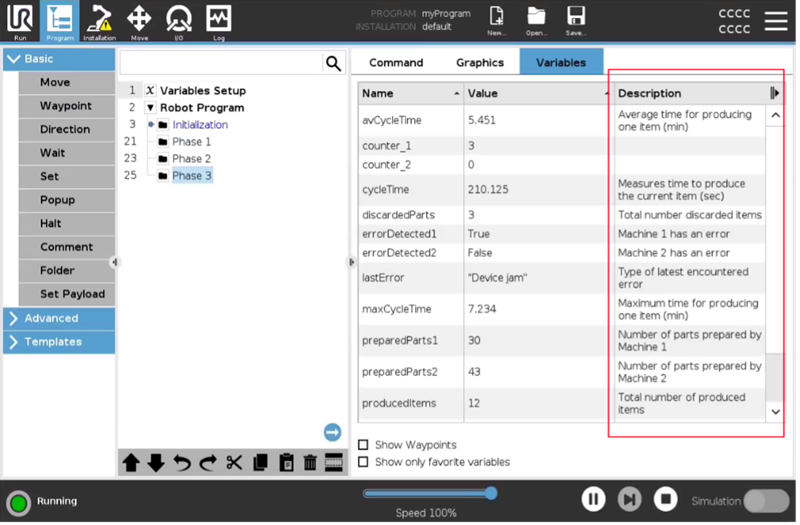
如果有必要,一个变量描述将跨越多行,以适应描述栏的宽度。
新的变量设置节点可用于为程序变量添加描述。
安装变量屏幕已被扩展,可以指定安装变量的描述。
可以通过折叠描述列来隐藏变量列表中的所有变量描述,这将为值/初始值列提供更多空间。例如,这对于完全查看一个 "大 "的变量值,例如一个姿势,或者在不需要看到变量描述的情况下,是非常有用的。
变量描述可以在所有有变量列表的屏幕上隐藏,即以下屏幕。
- 运行选项卡
- 变量选项卡
- 安装变量
- 变量设置节点
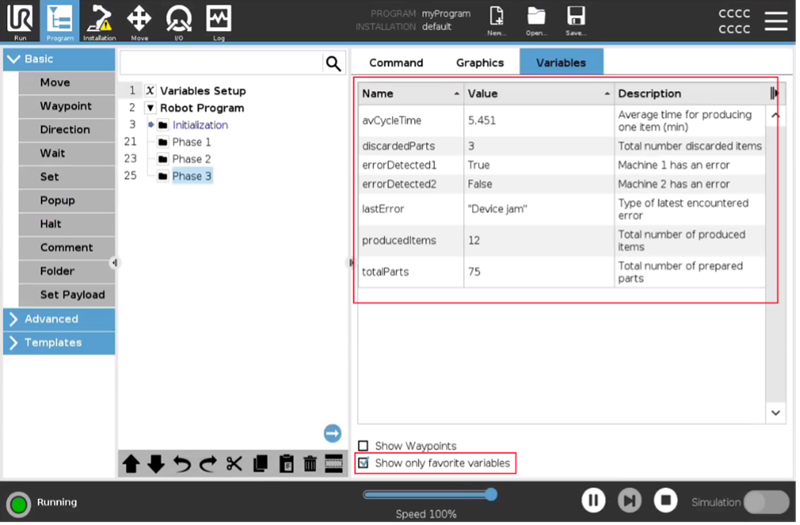
改进了变量列表的显示
变量列表的布局已经得到改进和调整,以提供一个更好的、统一的变量概览。这包括以下屏幕上的变量列表。
- 运行选项卡
- 变量选项卡
- 安装变量
- 变量设置节点
显示路点 "选项已从 "运行 "选项卡屏幕上删除,以简化操作人员的屏幕,因为这个选项通常只有程序员使用。请注意,这个选项在 "变量 "选项卡上仍然可用。
在 "运行 "选项卡和 "变量 "选项卡屏幕上,现在可以通过点击相应的行来突出显示感兴趣的特定变量(这将使该行以浅蓝色突出显示)。这对于监测特定变量的值很有用。
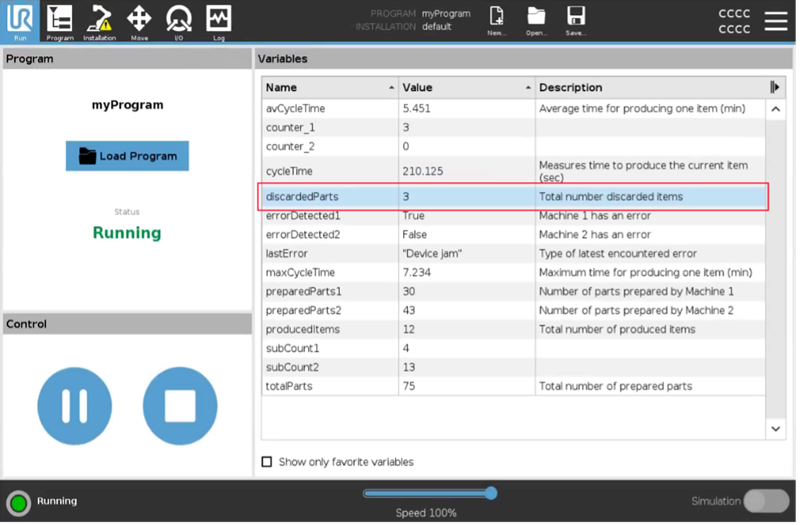
他的选择将保持不变(在改变屏幕和程序运行时也是如此),直到点选另一行或再次点选所选行来清除选择。
改进变量的配置
这个版本对创建/编辑安装变量和编辑程序变量属性的屏幕进行了UI改进。
程序变量
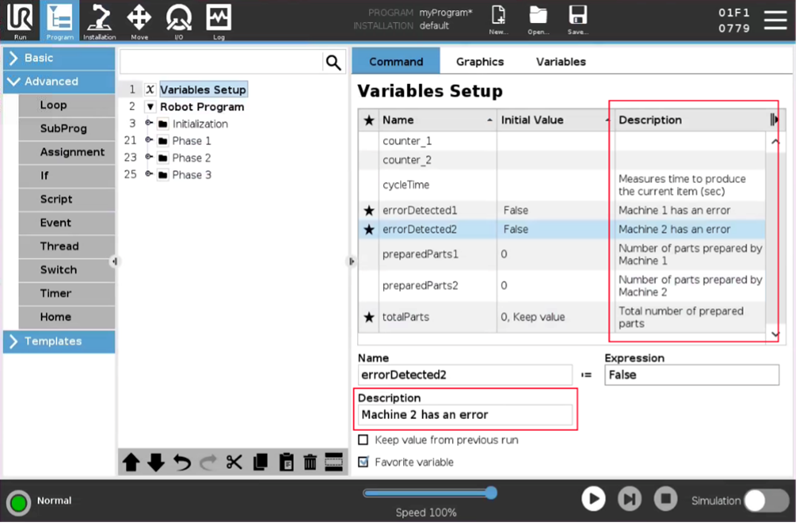
初始变量节点已被新的变量安装节点取代。
除了旧的初始变量节点的现有功能外,新的变量安装节点还提供了配置新的程序变量属性的选项。通过新的节点,可以:
- 为一个变量指定一个初始值(现有功能)
- 重命名一个变量(现有功能)
- 添加一个变量描述
- 将一个变量指定为最喜好的变量
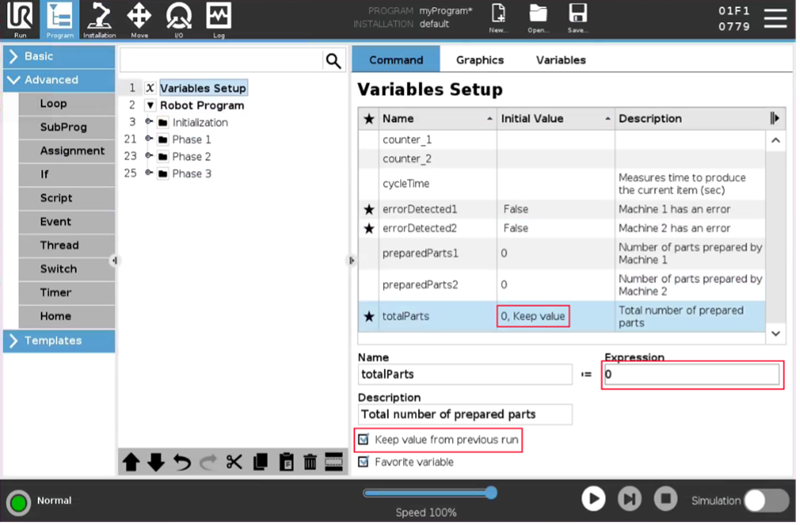
新节点具有改进的布局和工作流程,用于编辑程序变量的属性,并且它作为程序树中的第一个节点永久可见。
当启用保持上一次运行的值并定义了初始值时,这两个选项都会在变量列表的初始值栏中显示。
安装变量
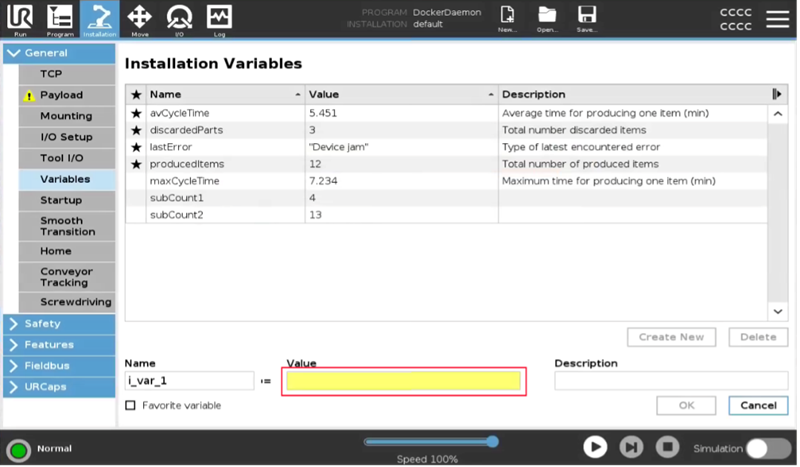
安装变量屏幕的布局已经被改进。该屏幕还引入了一个新的工作流程,可以通过编辑输入字段来修改安装变量的属性。
当创建一个新的安装变量时,一个空的数值字段现在以黄色背景突出显示,以表明必须为新变量指定一个初始值。
帮助的QR码
内置的PolyScope帮助(可通过 "汉堡 "菜单访问)已被一个新的帮助屏幕所取代,该屏幕上有一个单一的QR码,指向https://help.universal-robots.com,以提高PolyScope各版本的兼容性,并确保最新的帮助内容。基于在线的用户手册可以通过扫描QR码进行在线浏览。
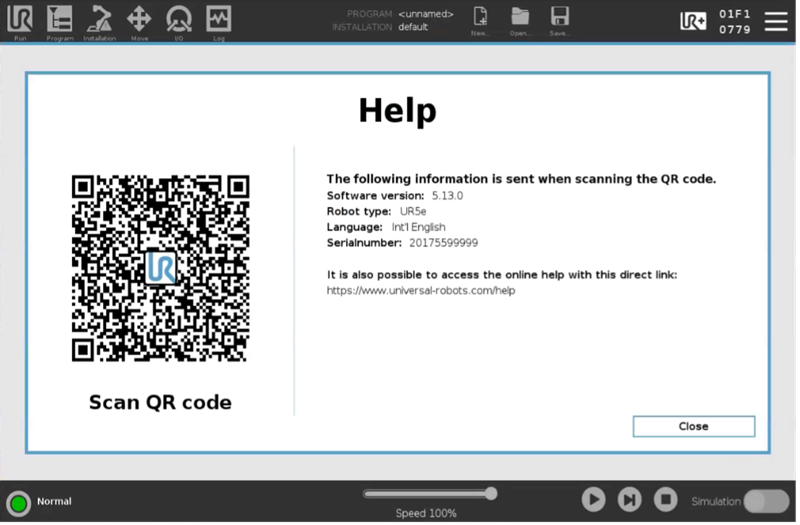
新的帮助屏幕取代了以前机器人上基于本地环境的PolyScope帮助(可点击的红色问号),后者不再可用。
请注意,通过扫描QR码,系统特定的信息,如软件版本、机器人类型、语言和序列号都会被发送,以提供一个定制的体验(具体的传输信息在帮助屏幕上有说明)。如果不希望这样,可以使用直接链接。
关于屏幕
可查看最终用户许可协议(EULA)
现在可以在PolyScope中阅读软件的最终用户许可协议(EULA)。EULA可以在 "关于 "屏幕的 "法律 "部分中查看。
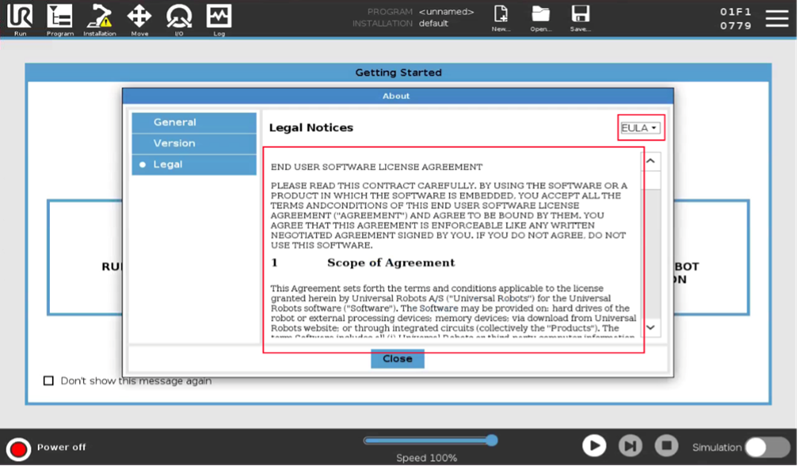
请注意,在这个版本中,软件的EULA只有英文版本。
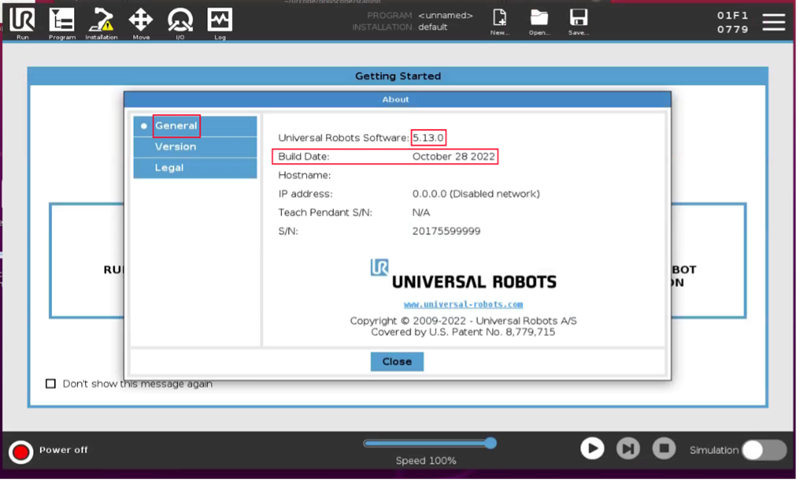
常规
版本标签已被重新命名为常规。
通用机器人软件 "字段现在只显示软件版本号,而不是以前软件版本中的较长字符串,例如 "URSoftware 5.12.4.1101661 (2022年8月31日)"。
构建日期显示在一个新的单独的构建日期字段中,而不是作为 "优傲机器人软件 "字段中显示的软件版本的一部分。
看板服务器
看板服务器的远程控制界面已经扩展了新的版本命令,它可以返回机器人上运行的UR软件的版本。新的命令返回一个带有版本号的字符串,例如 "5.13.0"。
该版本命令可以用来替代现有的Polyscope版本命令,后者的返回值是一个字符串,包含以前PolyScope版本中关于屏幕的完整版本信息,例如:"URSoftware 5.12.0.1101319 (2022年3月22日)"。
旧的Polyscope版本命令仍然可用,以确保向后兼容。
用户帮助
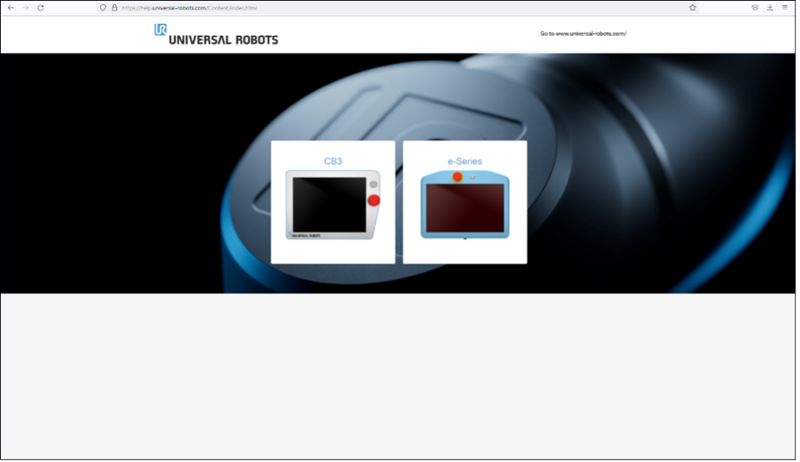
在线帮助
这个版本伴随着基于在线的用户手册的引入,可在http://help.universal-robots.com/上查看。
现有的用户手册现在可供在线浏览。
BUG修复
PolyScope
- 修复了在安装过程中,安全下的三个位置面板没有被翻译成非英语的问题。
- 修复了当操作模式由PROFISafe控制时,试图从PolyScope标题中改变操作模式时,显示的对话框会错误地显示操作模式由安全输入控制的问题。对话框的文字已经从 "无法改变操作模式“ 改为:"无法改变操作模式,目前由PROFIsafe操作模式控制"。
- 修复了在某些情况下,新安装的URCaps需要很长时间才能出现在URCaps设置屏幕的活动URCaps列表中的问题,安装URCap后。
- 拧紧节点:
- 修复了在某些情况下,启用起始点选项,会插入一个带有路点的MoveL节点,但无法改变类型(从固定),路点出现链接的问题。如果程序树包含两个(或更多)拧紧节点,其中启用的起始点有一个可变路点,这可能发生在一个新的拧紧节点。
- 当启用 "使用表达式跟随拧紧" 选项时,用表达式编辑器键盘取代常规的屏幕键盘作为表达式字段的输入方法。
- 修复了在机器人释放制动器时,初始化屏幕上的机器人状态面板没有过渡动画的问题(机器人激活→制动器释放/制动器已释放→机器人运行/机器人处于正常模式)。
- 修复了以下问题:在机器人手臂断电时,在I/O选项卡中切换数字工具输出,在PolyScope中似乎没有效果,但在机器人手臂通电时却意外地生效。现在,当机器人手臂的电源关闭时,切换工具输出将被忽略。
- 修复了一个问题,即有可能为同一个可配置的I/O分配一个I/O动作(如自由驱动)和一个安全功能(如3档位使能装置)。现在,在为可配置I/O分配安全功能时,任何现有的分配I/O动作都将被删除。
- 修复了在创建新程序后变量选项卡和运行选项卡中的变量表未被清除的问题。
URCap软件平台
- 修复了一个问题,即在某些情况下,创建新的安装后,错误的参数范围和注册功能的默认值会被现有的夹爪节点使用。这可能发生在动态调整其夹爪功能的多夹爪URCaps中(可在动态多夹爪URCap案例中发现)。