| Para usar o modelo IMMI
|
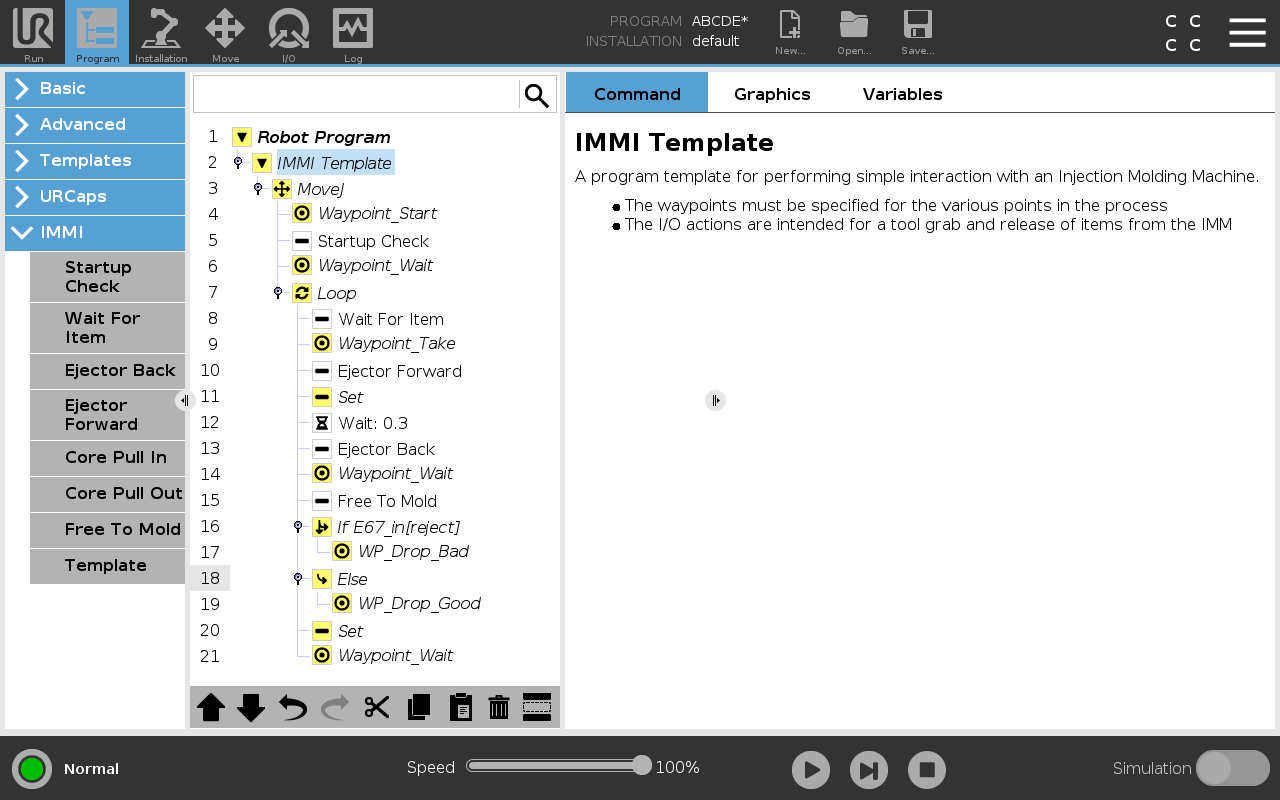
- No PolyScope, no cabeçalho, toque em Programa e selecione IMMI.
- Select Template for the program screen to appear with the template
loaded. A estrutura do modelo é visível no lado esquerdo do ecrã, conforme ilustrado abaixo.
- Para preparar o robô para manipular objetos, selecione os pontos de passagem desejados entre os seguintes:
- Waypoint_Start: Ponto inicial do braço do robô antes do início do processo de moldagem por injeção.
- Waypoint_Wait: Ponto de espera do braço do robô.
- Waypoint_Take: O braço do robô remove o item do ponto IMM.
- WP_Drop_Bad: A libertação do braço do robô rejeitou o ponto do item.
- WP_Drop_Good:A libertação do braço do robô aceitou o ponto do item.
- Selecione e personalize um dos seguintes nós para controlar a pinça:
- Set: Determina quando a ferramenta prende e solta um item.
- Loop: Execute o robô apenas quando um item precisar de ser removido do IMM.
- MoveJ: Ajuste a velocidade de movimento do robô para ajustar o tempo de ciclo do IMM.
- No nó Mover, ajuste a Velocidade da Articulação e a Aceleração da Articulação para acomodar a fragilidade do item.
|