IMMI I/O em nós de programa regulares
| Descrição |
Esta secção descreve como usar entradas e saídas IMMI em nós de programa regulares. |
Síntese da utilização de E/S do IMMI
| Descrição |
O ecrã IMMI I/O fornece indicadores para sinais de entrada e opções para controlar sinais de saída. Os botões para controlar sinais de saída estão, por defeito, disponíveis apenas no modo de programação do robô. Isto pode ser configurado conforme desejado no separador de definições de E/S, localizada no ecrã de Instalação. No arranque, os sinais de 24V estão altos. Todos os outros sinais estão baixos. No modo Automático, todos os sinais são altos por defeito. |
Síntese de IMMI E/S
Controlo |
Estes sinais são utilizados pelas estruturas do programa para controlar a interação entre o robô e o IMM. |
|
|
| Estado |
|
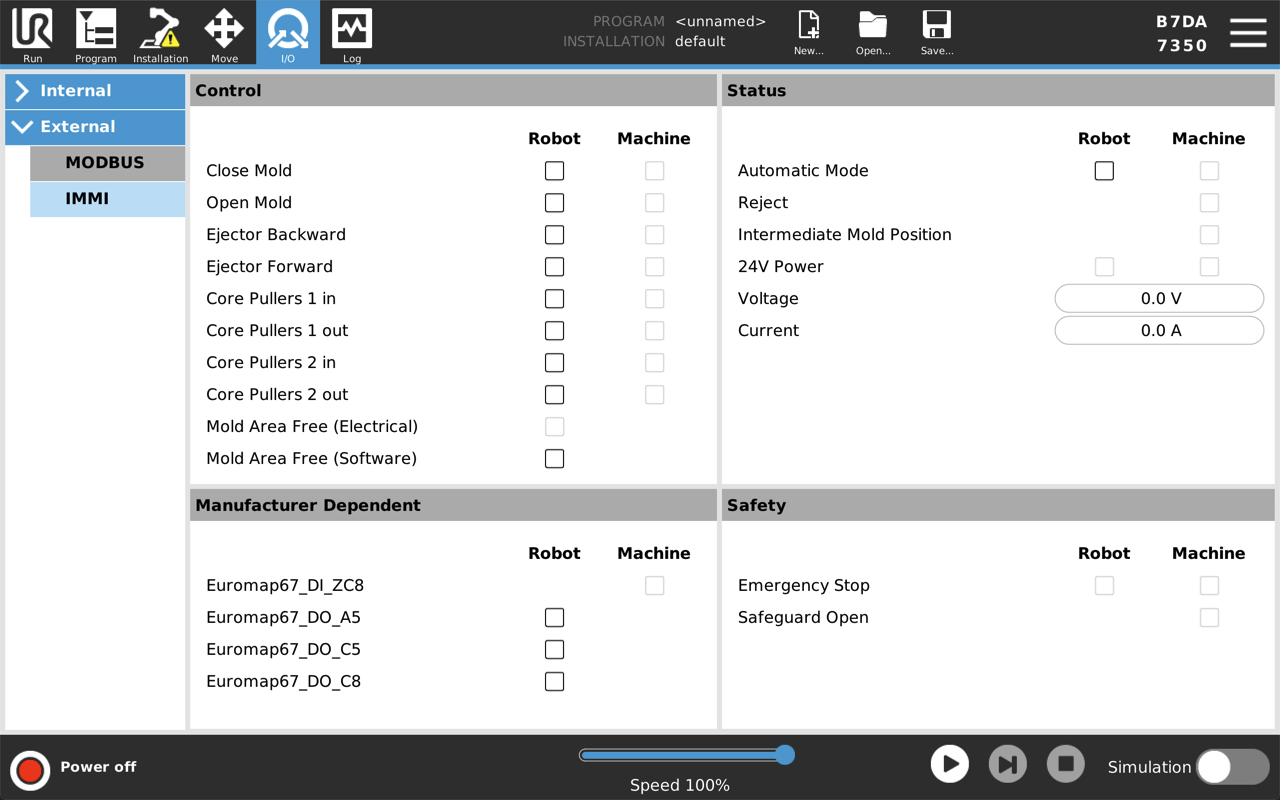
| Dependente do Fabricante |
Estes sinais são opcionais, mas podem ser utilizados, se necessário, para propósitos específicos pelo fabricante do IMM. |
Segurança |
Na coluna do robô, o indicador de paragem de emergência não pode ser controlado neste ecrã. Indica apenas que o robô está numa paragem de emergência. O sinal da paragem de emergência da máquina indica se a IMM está parada por emergência. A entrada de proteção aberta mostra o estado dos sinais dos "dispositivos de segurança" especificados na norma EUROMAP 67. |
|
Se uma estrutura de programa não incluir sinais I/O, mas se pretender utilizá-lo num programa de robô, poderá usar os nós de Ação e Espera descritos na secção seguinte. |
Como usar E/S de IMMI em nós de programa regulares
| Aguardar |
|
| Definir |
|
| Expressão |
Pode aceder ao Editor de Expressão a partir de vários nós.
|