| Per usare il modello IMMI
|
- In PolyScope, alla voce Intestazione, toccare Programma e selezionare IMMI.
- Select Template for the program screen to appear with the template
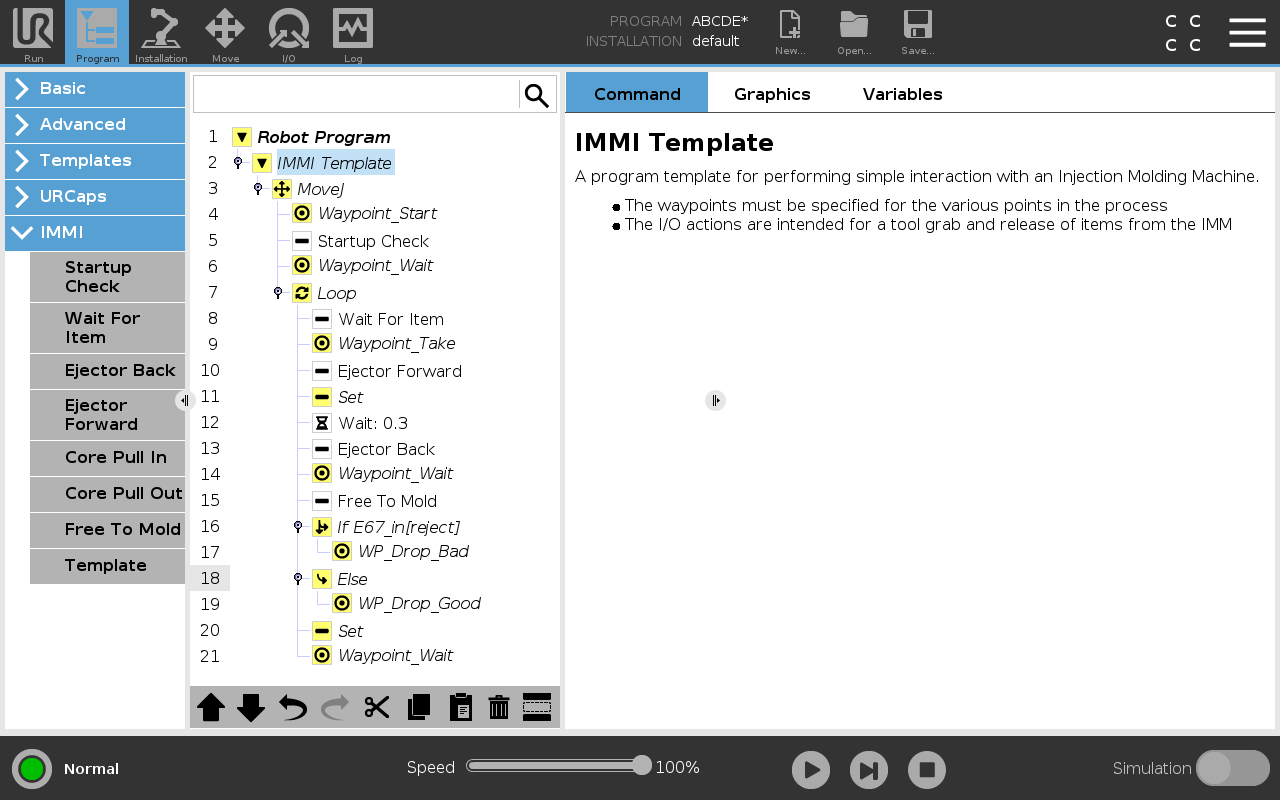
loaded. La struttura del modello diventerà visibile sul lato sinistro dello schermo, come illustrato di seguito.
- Per preparare il robot alla manipolazione degli oggetti, selezionare i punti percorso desiderati tra i seguenti:
- Punto percorso avvio: punto di avvio del braccio del robot prima dell'inizio del processo di stampaggio a iniezione.
- Punto percorso attesa: punto di attesa del braccio del robot.
- Punto percorso presa: punto in cui il braccio del robot rimuove un elemento dall'IMM.
- PP rilascio difettosi: punto di rilascio dell'elemento difettoso da parte del braccio del robot.
- PP rilascio conformi: punto di rilascio dell'elemento conforme da parte del braccio del robot.
- Per controllare una pinza, selezionare e personalizzare uno dei nodi seguenti:
- Imposta: determina quando l'utensile afferra e rilascia un elemento.
- Ciclo: consente di eseguire il robot solo quando è necessario rimuovere l'elemento dall'IMM.
- MuoviJ: consente di regolare la velocità di movimento del robot per adattarsi al tempo di ciclo dell'IMM.
- Nel nodo Muovi, regolare la velocità del giunto e l'accelerazione del giunto in base alla fragilità dell'elemento.
|