I/O IMMI in nodi programma standard
| Descrizione |
Questa sezione descrive come utilizzare gli ingressi e le uscite IMMI in nodi programma standard. |
Panoramica dell'utilizzo dell'I/O IMMI
| Descrizione |
La schermata I/O IMMI fornisce indicatori per i segnali di ingresso e opzioni per il controllo dei segnali di uscita. Per impostazione predefinita, le opzioni per controllare i segnali di uscita sono disponibili solo nella modalità di programmazione del robot. È possibile riconfigurare queste opzioni nella scheda Setup I/O, che si trova nella schermata Installazione. All'avviamento, la potenza dei segnali 24 V è elevata. Tutti gli altri segnali sono deboli. In modalità automatica, tutti i segnali sono forti per impostazione predefinita. |
Panoramica I/O IMMI
Controllo |
Questi segnali sono utilizzati dalle strutture di programma per controllare l'interazione fra il robot e l'IMM. |
|
|
| Stato |
|
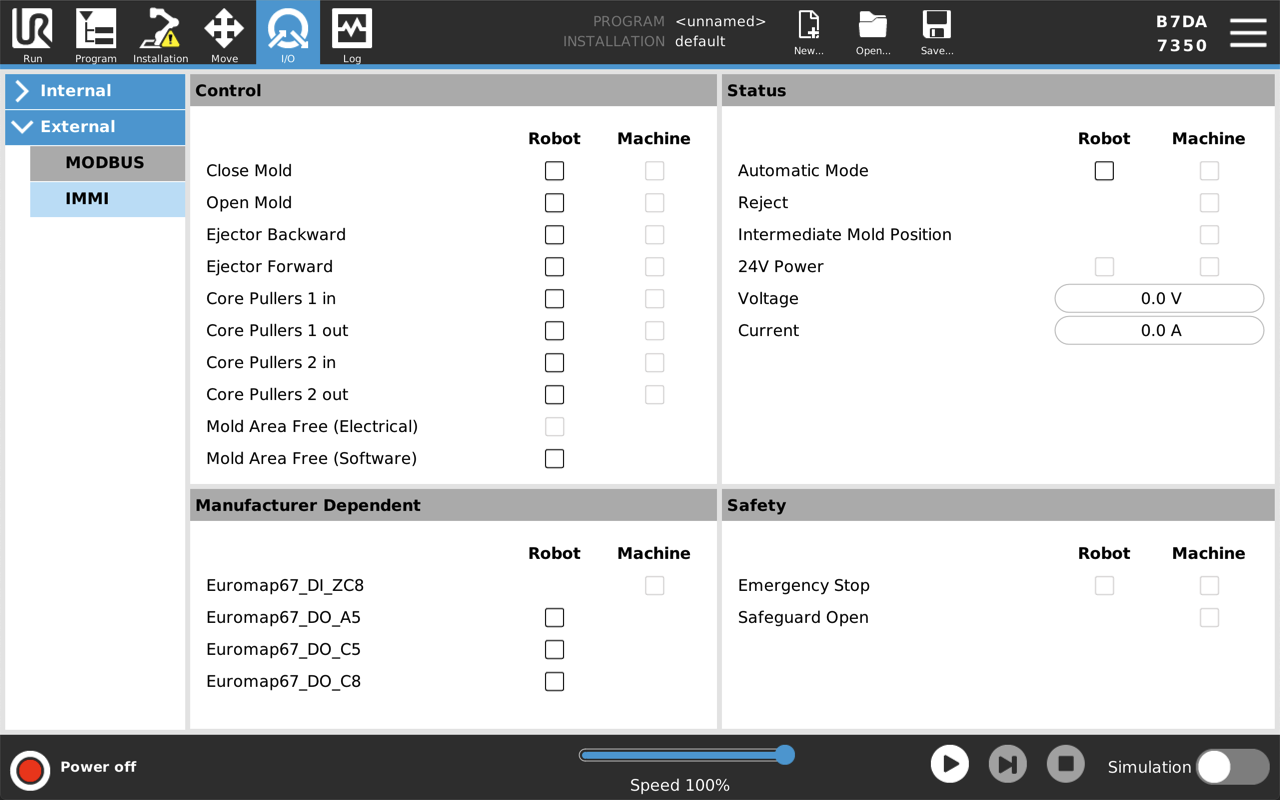
| In funzione del costruttore |
Questi segnali sono opzionali, ma possono essere utilizzati, ove necessario, per fini specifici dal costruttore dell'IMM. |
Sicurezza |
Nella colonna del robot, l'indicatore di arresto di emergenza non può essere controllato da questa schermata. Indica semplicemente che il robot si trova in condizione di arresto di emergenza. Il segnale di arresto di emergenza dalla macchina indica se la IMM si trova in condizione di arresto di emergenza. L'input Protezione aperta indica lo stato dei segnali relativi ai "Dispositivi di sicurezza" specificati nello standard EUROMAP 67. |
|
Se una struttura di programma non include segnali I/O, ma è comunque destinata a essere utilizzata in un programma del robot, è possibile utilizzare i nodi Azione e Attesa descritti nella sezione sottostante. |
Come usare l'I/O IMMI in nodi programma standard
| Attendere |
|
| Imposta |
|
| Espressione |
È possibile accedere all'Editor espressioni da più nodi.
|