| Pour utiliser le modèle IMMI
|
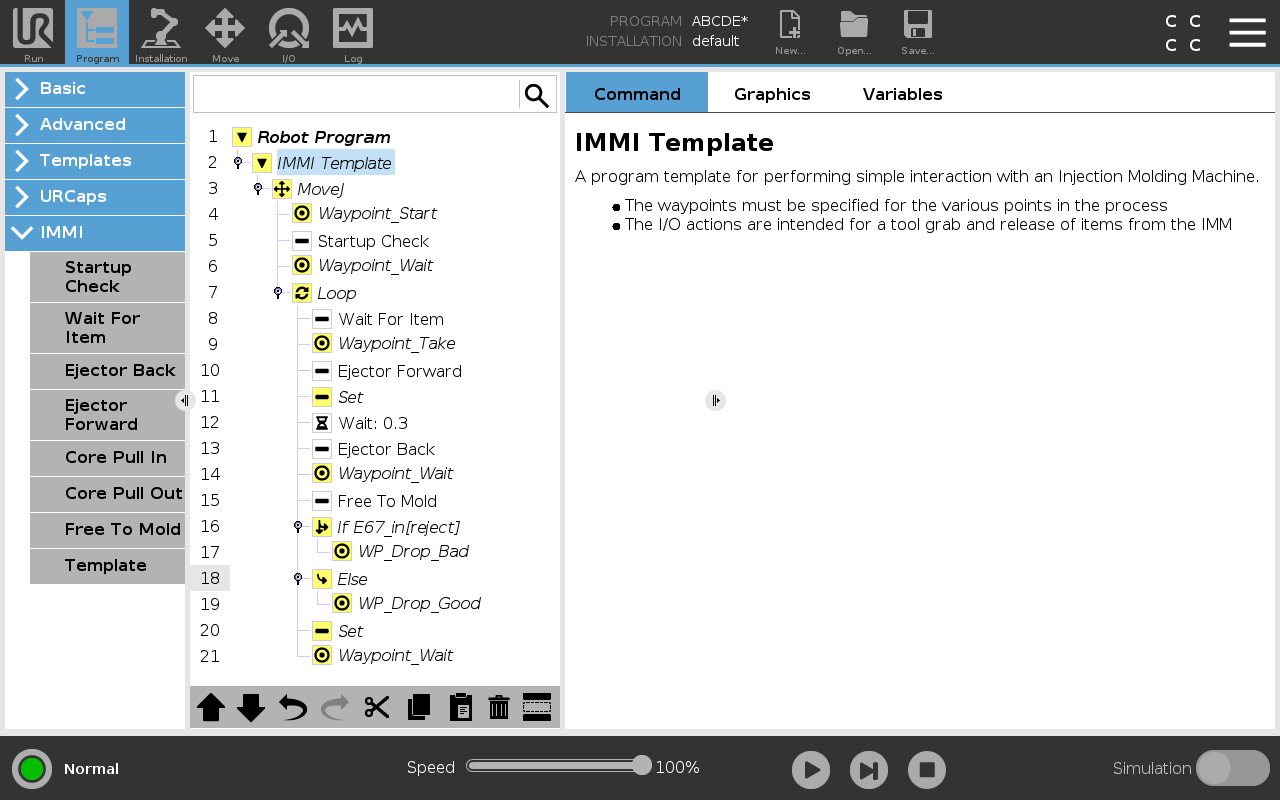
- Dans PolyScope, dans l'en-tête, appuyez sur Programme et sélectionnez IMMI.
- Select Template for the program screen to appear with the template
loaded. La structure du modèle est visible du côté gauche de l'écran, comme illustré ci-dessous.
- Pour préparer le robot à la manipulation d'objets, sélectionnez les points de passage parmi les suivants :
- Pointpassage_Départ : le point de départ du bras robot avant le début du processus de moulage par injection.
- Pointpassage_Attendre : point d'attente du bras robot.
- Pointpassage_Prendre : point où le bras robot retire un article de la MMI.
- PP_Lâcher_Mauvais : point où le bras robot lâche l'objet rejeté.
- PP_Lâcher_Bon : point où le bras robot lâche l'objet accepté.
- Sélectionnez et personnalisez un des nœuds suivants pour contrôler le préhenseur :
- Poser : détermine lorsque l'outil attrape et lâche un objet.
- Boucle : le robot ne s'exécute que lorsqu'un objet doit être retiré de la MMI.
- DéplacementJ : ajuste la vitesse de mouvement du robot pour correspondre au cycle de la MMI.
- Dans le nœud de mouvement, ajustez la vitesse et l'accélération de l'articulation pour prendre en compte la fragilité de l'objet.
|