| Zum Verwenden der SGMS-Vorlage
|
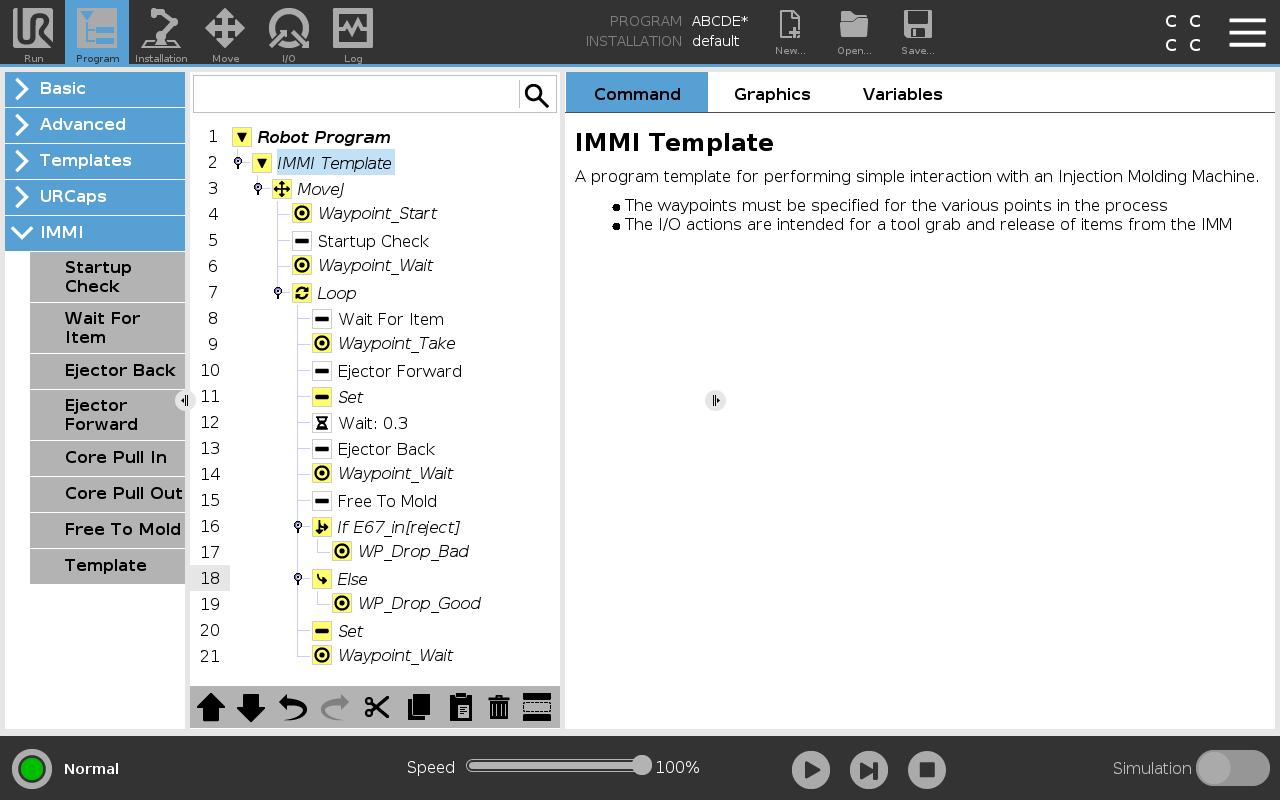
- Tippen Sie in PolyScope in der Kopfzeile auf „Programm“ und wählen Sie SGMS.
- Select Template for the program screen to appear with the template
loaded. Die Vorlagenstruktur wird auf der linken Seite des Bildschirms angezeigt, wie unten abgebildet.
- Um den Roboter auf die Umschlagung von Objekten vorzubereiten, wählen Sie unten die gewünschten Wegepunkte aus:
- Waypoint_Start: Startpunkt des Roboterarms vor Beginn der Prozess des Spritzgusses beginnt.
- Waypoint_Wait: Roboterarm-Wartepunkt.
- Waypoint_Take: Roboterarm entfernt Werkstück von SGM-Punkt.
- WP_Drop_Bad: Roboterarm löst abgelehnten Werkstückpunkt.
- WP_Drop_Good:Roboterarm löst akzeptieren Werkstückpunkt.
- Wählen Sie einen der folgenden Knoten aus und passen Sie ihn an, um einen Greifer zu steuern:
- Einstellen: Bestimmt den Griff und das Lösen von Positionen.
- Schleife: Starten Sie den Roboter nur dann, wenn das Werkstück von der SGM entfernt werden muss.
- MoveJ: Anpassung der Bewegungsgeschwindigkeit an die SGM-Zykluszeit.
- Passen Sie im „Bewegen“-Knoten die Gelenkgeschwindigkeit und Gelenkbeschleunigung an, um sie an die Zerbrechlichkeit von Werkstücken anzupassen.
|