SGMS-E/A in regulären Programmknoten
| Beschreibung |
Dieser Abschnitt beschreibt die Verwendung von SGMS-Ein- und Ausgängen in regulären Programmknoten. |
Den SGMS E/A-Überblick verwenden
| Beschreibung |
Der SGMS E/A-Bildschirm bietet Indikatoren für Eingangssignale und Optionen für die Steuerung der Ausgabesignale. Die Optionen zur Steuerung der Ausgangssignale stehen standardmäßig nur im Programmiermodus des Roboters zur Verfügung. Dieser kann nach Bedarf über den Tab E/A-Einstellung im Installationsbildschirm erneut konfiguriert werden. Bei Inbetriebnahme sind die 24 V-Signale hoch. Alle anderen Signale sind niedrig. Im Automatikmodus sind alle Signale standardmäßig High. |
SGMS E/A-Übersicht
Steuerung |
Diese Signale werden von den Programmstrukturen für die Steuerung der Interaktion zwischen Roboter und SGM verwendet. |
|
|
| Status |
|
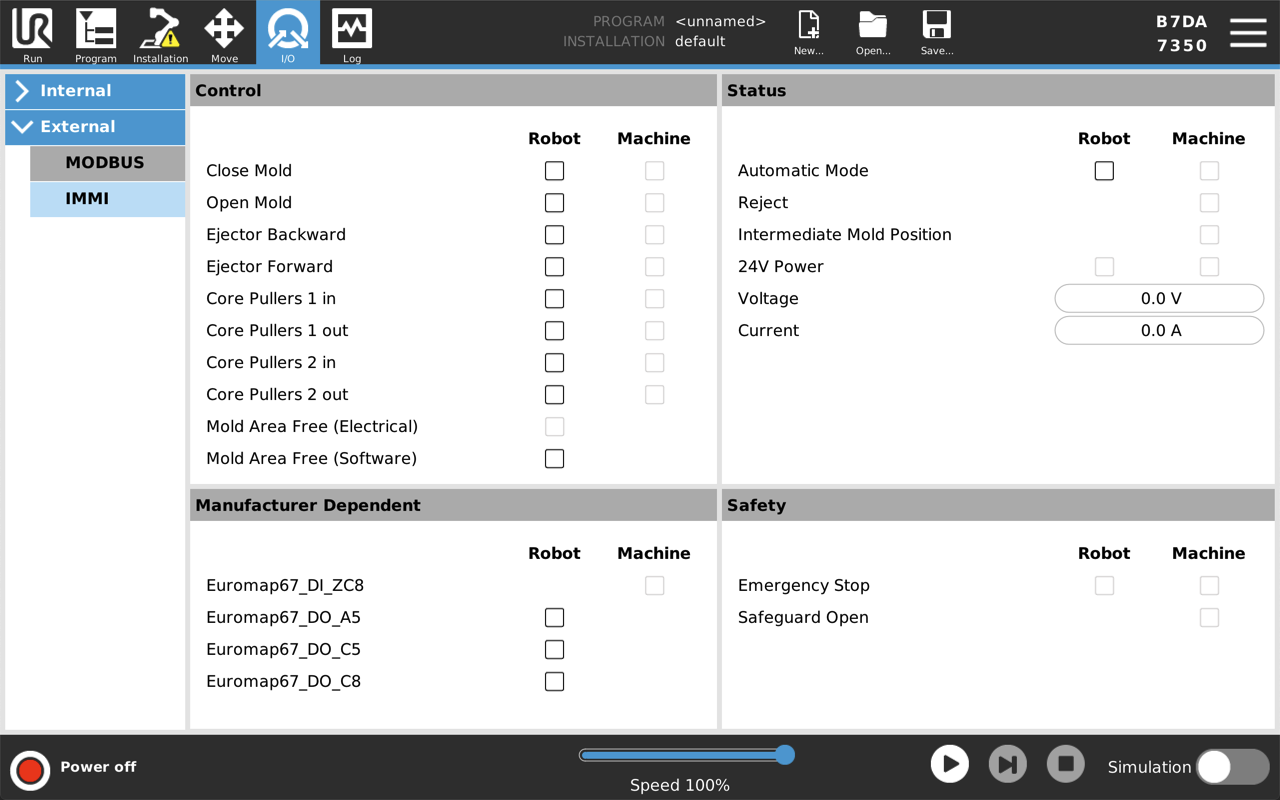
| Herstellerabhängig |
Diese Signale sind optional und können nach Ermessen des SGM-Herstellers zu bestimmten Zwecken verwendet werden. |
Sicherheit |
In der Roboter-Spalte kann die Anzeige der Notabschaltung nicht über diesen Bildschirm gesteuert werden. Es wird lediglich angezeigt, dass sich der Roboter in einem „Nothalt“-Zustand befindet. Das Notabschaltungssignal der Maschine zeigt an, ob die SGM durch eine Notabschaltung angehalten wurde. Der Eingang „Schutz offen“ zeigt den Status der Signale von „Sicherheitsgeräten“ gemäß Vorgabe im EUROMAP 67-Standard an. |
|
Wenn eine Programmstruktur keine E/A-Signale enthält, aber dennoch für die Verwendung in einem Roboterprogramm vorgesehen ist, können Sie die im folgenden Abschnitt beschriebenen Knoten „Aktion“ und „Warten“ verwenden. |
SGMS-E/A in regulären Programmknoten verwenden
| Warten |
|
| Einstellen |
|
| Ausdruck |
Sie können von verschiedenen Knoten aus auf den Ausdruck-Editor zugreifen.
|