| 使用 IMMI 模板
|
- 在 PolyScope 的标题中,点按“程序”,然后选择 IMMI。
- Select Template for the program screen to appear with the template
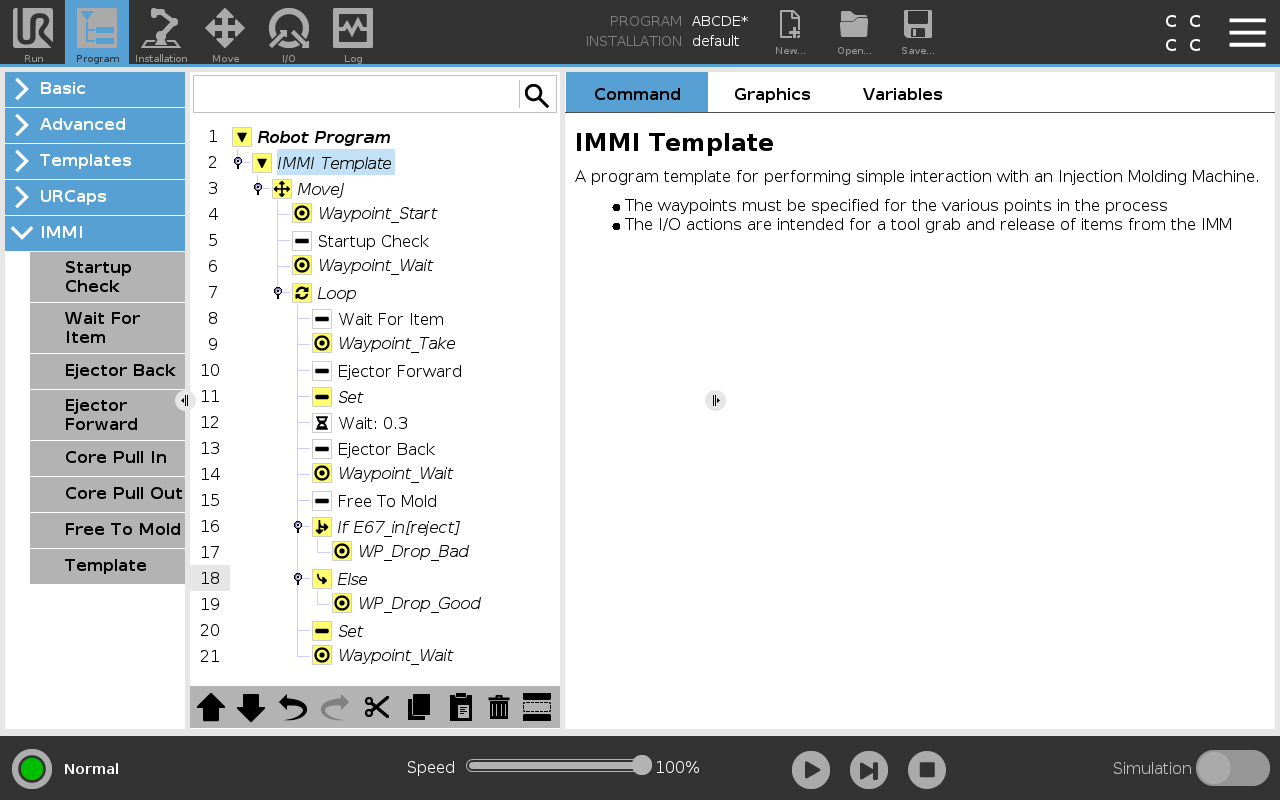
loaded. 模板结构在屏幕左侧显示,如下图所示。
- 要准备机器人以处理对象,请从以下项中选择所需的路点:
- 路点开始:注塑过程开始之前的机器人手臂起点。
- 路点等待:机器人手臂等待点。
- 路点获取:机器人手臂从 IMM 点取下物品。
- 路点放下不良:机器人手臂释放被拒绝的物品点。
- 路点放下良好:机器人手臂释放已接受的物品点。
- 选择并自定义以下节点之一以控制抓手:
- 设置:确定工具抓取和释放工件的时间。
- 循环:仅在必须从 IMM 中取下工件时才运行机器人。
- MoveJ:调整机器人移动速度以适应 IMM 循环时间。
- 在移动节点中,调整“关节速度”和“关节加速度”以考虑工件易碎性。
|