常规程序节点中的 IMMI I/O
| 描述 |
本节介绍如何在常规程序节点中使用 IMMI 输入和输出。 |
使用 IMMI I/O 概览
| 描述 |
IMMI I/O 屏幕上包含输入信号的指示器以及用于控制输出信号的选项。 默认情况下,用于控制输出信号的选项只能在机器人编程模式下使用。 这可以根据需要在安装屏幕的 I/O 设置选项卡中重新进行配置。 启动时,24V 信号为高电平。 所有其他信号均为低电平。 在自动模式下,所有信号默认为高电平。 |
IMMI I/O 概览
控制 |
程序结构使用这些信号来控制机器人与 IMM 之间的交互。 |
|
|
| 状态 |
|
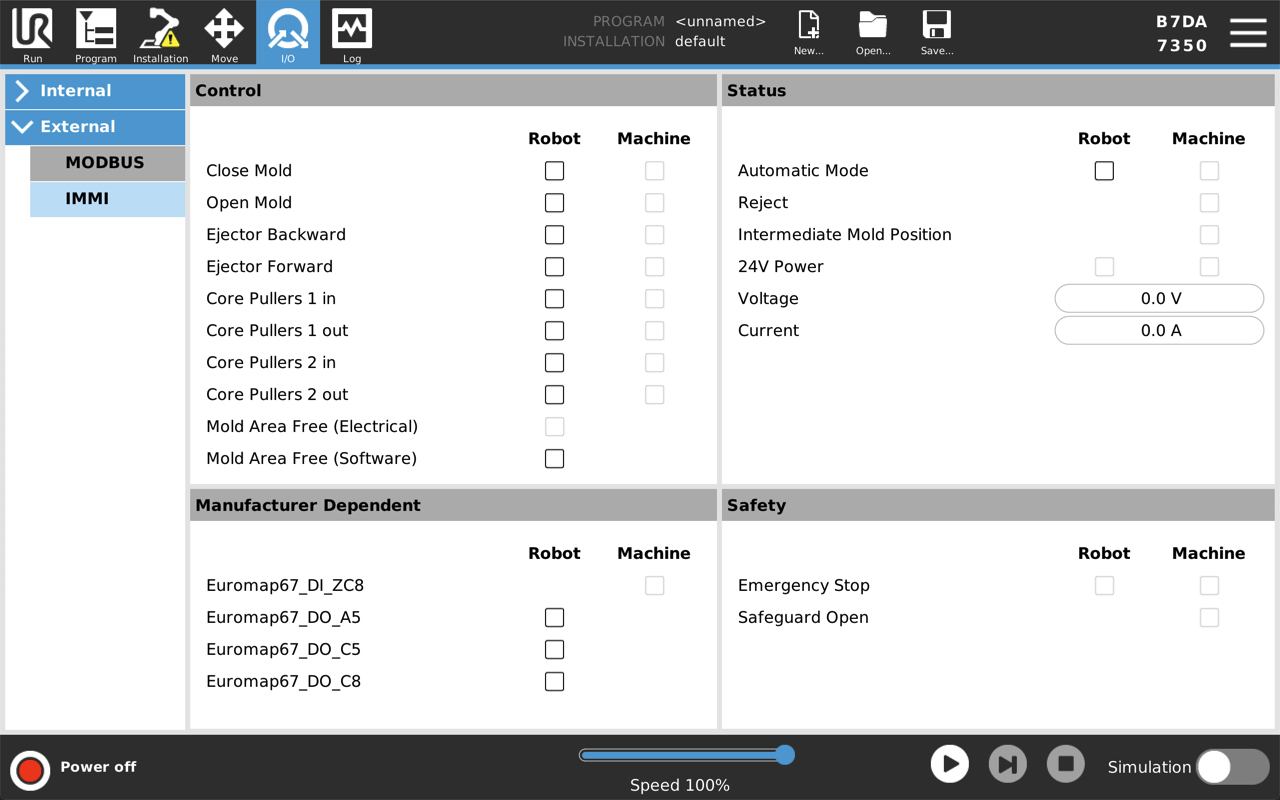
| 由制造商设定 |
这些信号为可选信号,但可由 IMM 制造商根据需要用于实现特定目的。 |
安全 |
在机器人列中,紧急停止指示器不能从该屏幕进行控制。 它只用于指示机器人是否已紧急停止。 机器发送的紧急停止信号指示 IMM 是否已紧急停止。 防护打开输入显示 EUROMAP 67 标准中规定的“安全装置”信号的状态。 |
|
如果程序结构不包含 I/O 信号,但仍要在机器人程序中使用,则可使用下一节中描述的“动作”和“等待”节点。 |
如何在常规程序节点中使用 IMMI I/O
| 等待 |
|
| 设置 |
|
| 表达式 |
您可以从多个节点访问表达式编辑器。
|