| IMMI テンプレートを使用するには
|
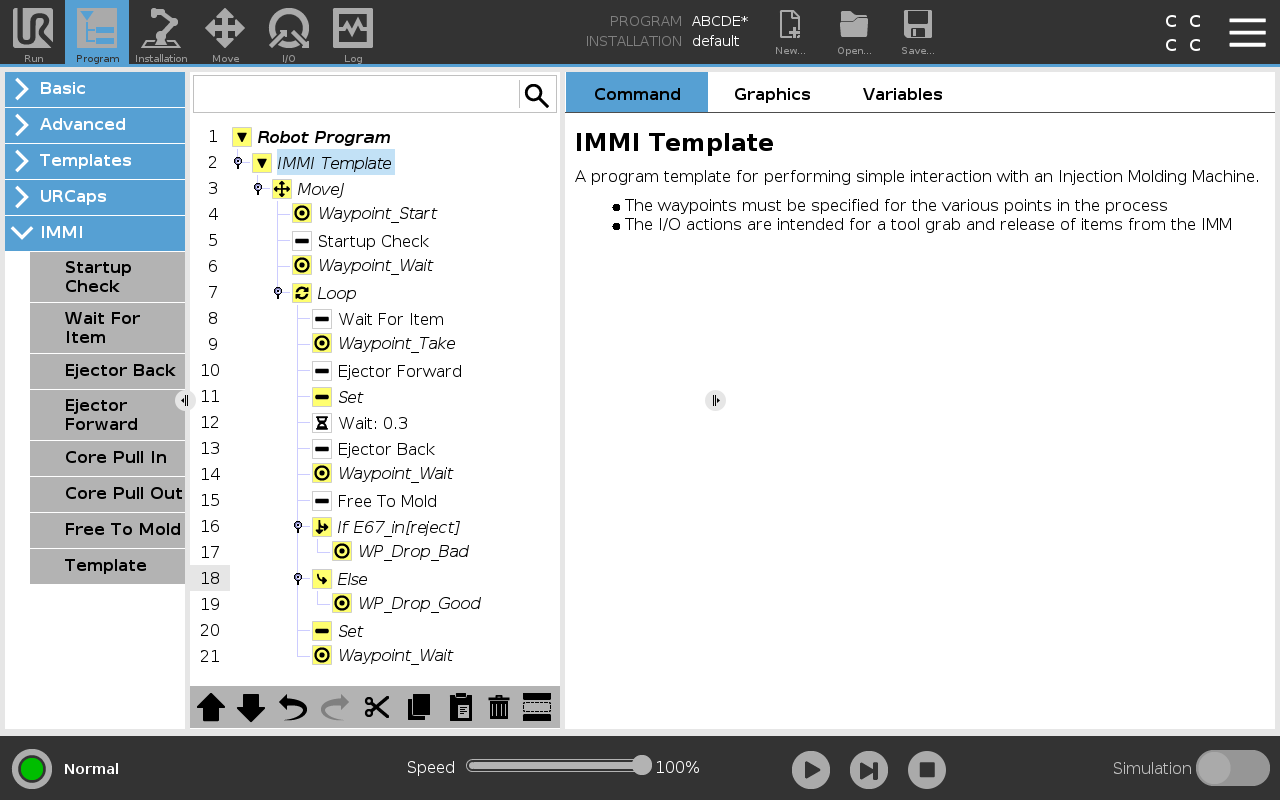
- PolyScope で [ヘッダー] の中から [プログラム] をタップし、[IMMI] を選択します。
- Select Template for the program screen to appear with the template
loaded. 次に、以下の図のようにテンプレート構造が画面の左側に表示されます。
- ロボットが対象物を処理できるように準備するには、以下から目的のウェイポイントを選択します。
- Waypoint_Start: 射出成形処理が開始する前のロボットアームの開始点です。
- Waypoint_Wait: ロボットアームの待機点です。
- Waypoint_Take: ロボットアームが IMM の場所からワークを取り出します。
- WP_Drop_Bad: ロボットアームが拒否されたワークの場所を解放します。
- WP_Drop_Good: ロボットアームが許容されたワークの場所を解放します。
- グリッパを制御するには以下のコマンドのいずれかを選択してカスタマイズします。
- 設定: ツールがワークを掴み、解放するタイミングを決定します。
- ループ: IMM からワークを取り出す必要がある場合にのみロボットを実行します。
- MoveJ: IMM のサイクルタイムに合うようにロボットの作動速度を調整します。
- [移動] コマンドで、ワークの壊れやすさに合わせてジョイント速度とジョイント加速度を調整します。
|