通常のプログラムノードにおける IMMI I/O
| 説明 |
このセクションでは、通常のプログラムノードで IMMI の入出力を使用する方法について説明します。 |
IMMI I/O 概要を使用する
| 説明 |
IMMI I/Oの画面には、入力信号のインジケーターと出力信号制御用のオプションが表示されます。 出力信号を制御するオプションは、デフォルトではロボットのプログラミングモードでのみ使用できます。 これは、設置設定画面にある [I/O 設定] タブで、必要に応じて再設定できます。 起動時は24V信号が高です。 その他すべての信号は低です。 自動モードでは、すべての信号がデフォルトで高になります。 |
IMMI I/O の概要
制御 |
これらの信号は、プログラム構造がロボットと IMM の対話を制御するために使用されます。 |
|
|
| ステータス |
|
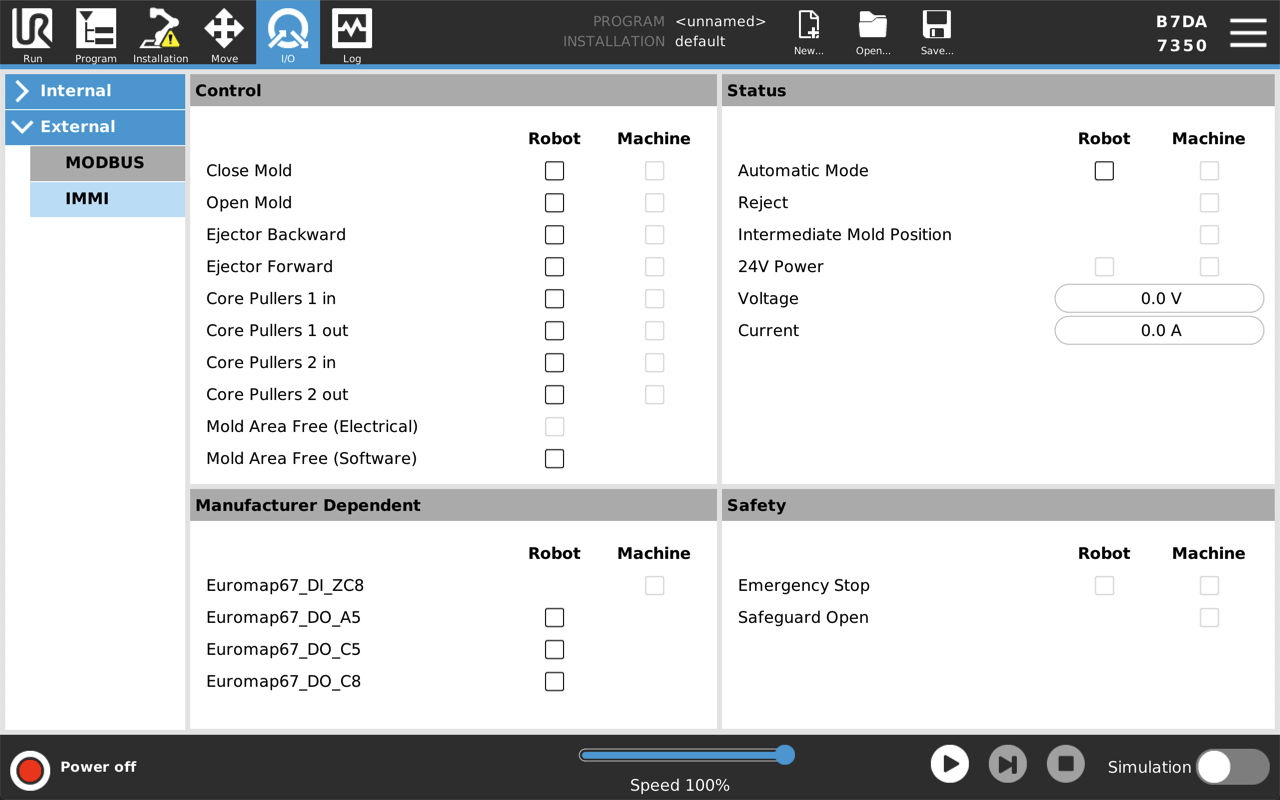
| メーカー依存 |
これらの信号はオプションですが、必要に応じて IMM メーカーが特定の目的で使用できます。 |
安全性 |
ロボットの列では、[非常停止] と [成形位置空き (電気)] インジケーターはこの画面からは操作できません。 単に IMM が非常停止していることを示します。 機械からの非常停止信号は、IMM が非常停止しているかどうかを示します。 安全防護開(Safeguard Open)入力は、EUROMAP 67 規格で規定されている「Safety devices」(安全装置)信号の状態を示します。 |
|
プログラム構造に I/O 信号が含まれないものの、ロボットプログラムでの使用を想定している場合は、以下のセクションで説明されている処理と待機コマンドを利用することができます。 |
通常のプログラムノードでの IMMI I/O の使用方法
| 待機 |
|
| 設定 |
|
| 式 |
式エディタには複数のコマンドからアクセスできます。
|