ロボットアームの清掃と点検
| 説明 |
定期的なメンテナンスの一環として、このマニュアルの推奨事項とお住まいの地域の要件に従ってロボットアームを清掃することができます。
|
| 掃除方法 |
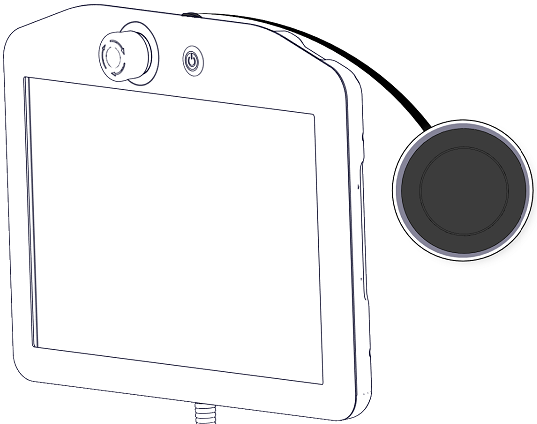
ロボットアームおよび/またはティーチペンダントのほこり、汚れ、または油は、以下に記載されている洗浄剤のいずれかを布につけて掃除できます。
表面の準備: 下記の溶液を塗布する前に、表面の汚れやゴミを取り除く必要がある場合があります。
洗浄剤:
適用: 溶液は通常、スプレーボトル、ブラシ、スポンジ、または布を使用して、洗浄が必要な表面に塗布します。 汚染の程度や洗浄する表面の種類に応じて、直接塗布することも、さらに希釈して塗布することもできます。 撹拌: 頑固な汚れや汚れがひどい箇所の場合は、ブラシ、スクラバー、またはその他の機械的な手段を使用して溶液を撹拌し、汚染物質を落とします。 滞留時間: 必要に応じて、溶液を表面に最大 5 分間滞留させ、効果的に浸透して汚染物質を溶解します。 すすぎ: 滞留時間後、通常は、溶解した汚染物質と残っている洗浄剤の残留物を除去するために表面を水で徹底的にすすぎます。 残留物による損傷や安全上の危険を防ぐために、徹底的にすすぐことが重要です。 乾燥: 最後に、洗浄した表面を自然乾燥させるか、タオルを使用して乾燥させます。 希釈した洗浄液に漂白剤を使用しないでください。 |
|
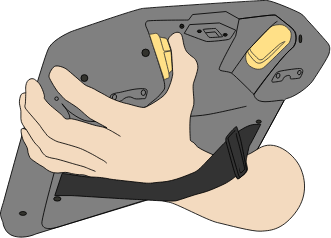
グリースは刺激性があり、アレルギー反応を引き起こす可能性があります。 接触、吸入、または摂取は、病気や怪我を引き起こす可能性があります。 病気や怪我を防ぐために、以下に従ってください。
|
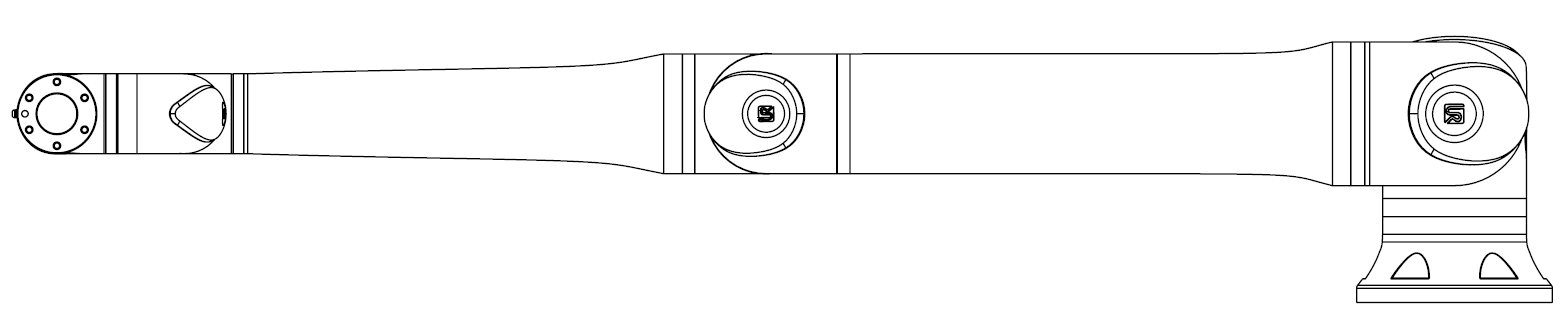
| ロボットアームの検査計画 |
以下の表は、Universal Robots が推奨する検査の種類をチェックリストにしたものです。 表で推奨されているように、定期的に検査を実施してください。 参照されている部品で、許容できない状態にあるものは修正または交換が必要です。
|
||||||||||||||||||||||||||||||||||||||||||||||||
保証期間内にロボットの損傷が見られた場合、ロボットを購入した販売代理店にお問い合わせください。
|
| 検査 |
|