プログラム構造ノード
| 説明 |
各コマンドのステップセットは、個々のステップを有効/無効化するチェックボックスを使用して構成できます。
|
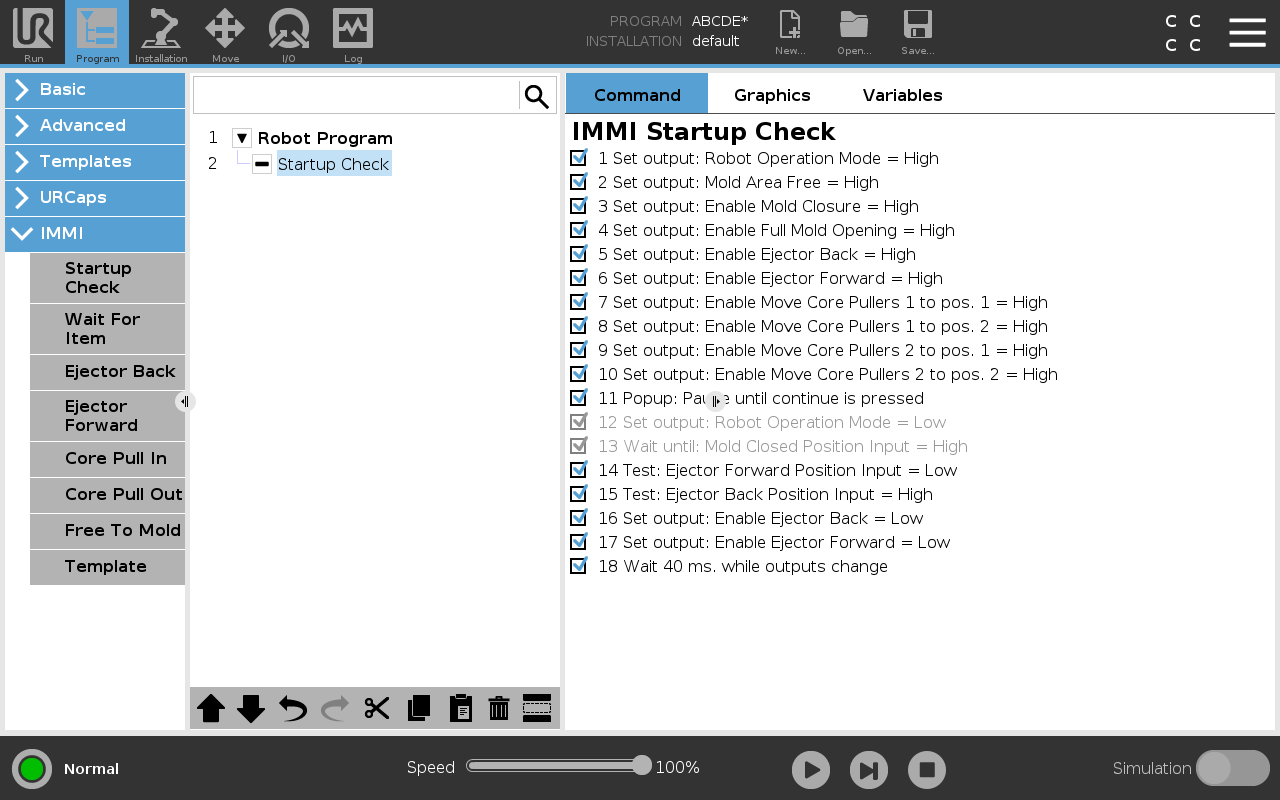
| スタートアップ確認 |
Intended for use once at the beginning of a robot program, this node ensures the robot and machine are set up correctly before molding starts.
|
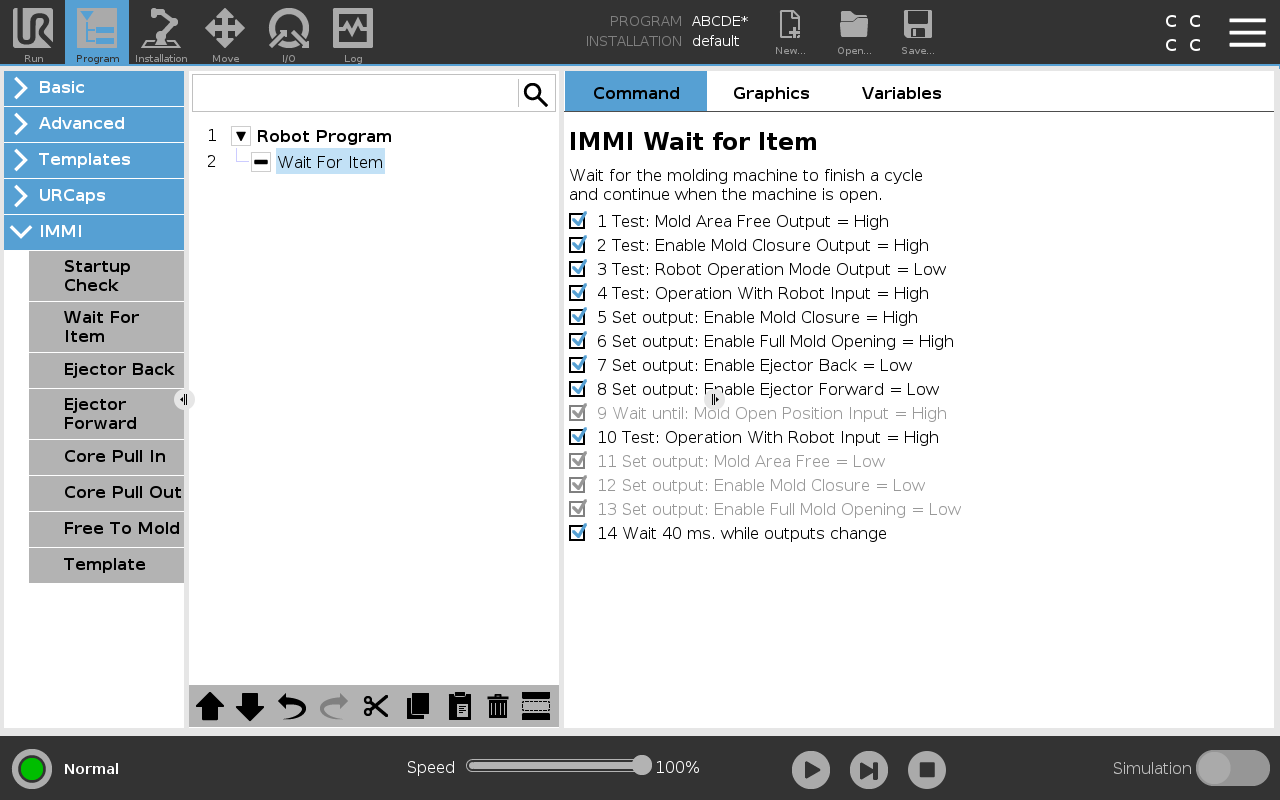
| ワーク待ち |
ワークが IMM で成形されるまでロボットを待機させることを目的としています。
|
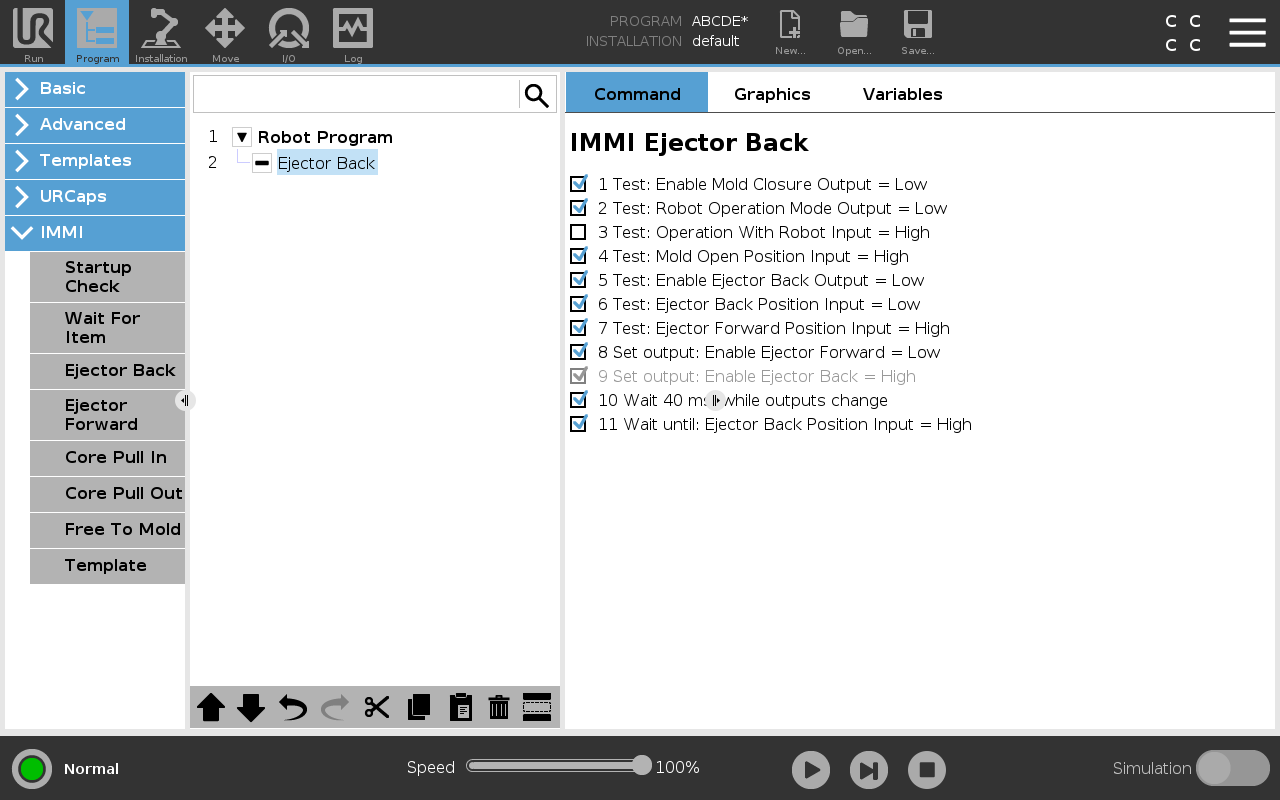
| イジェクター後退 |
イジェクターが元の位置に戻る動作を可能にします。
|
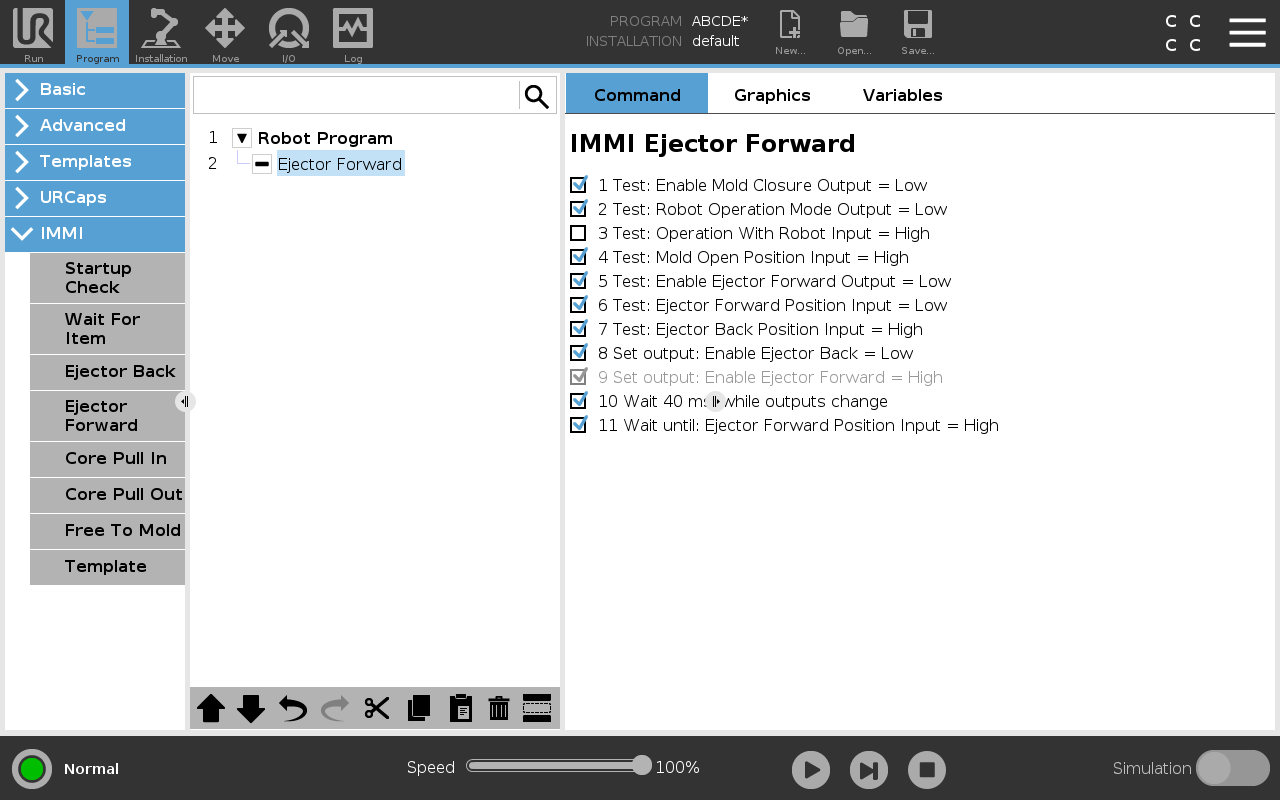
| イジェクター前進 |
金型から製品を取り出すためのエジェクタ動作を有効にします。 Should be used when the robot is in position ready for grasping the item.
|
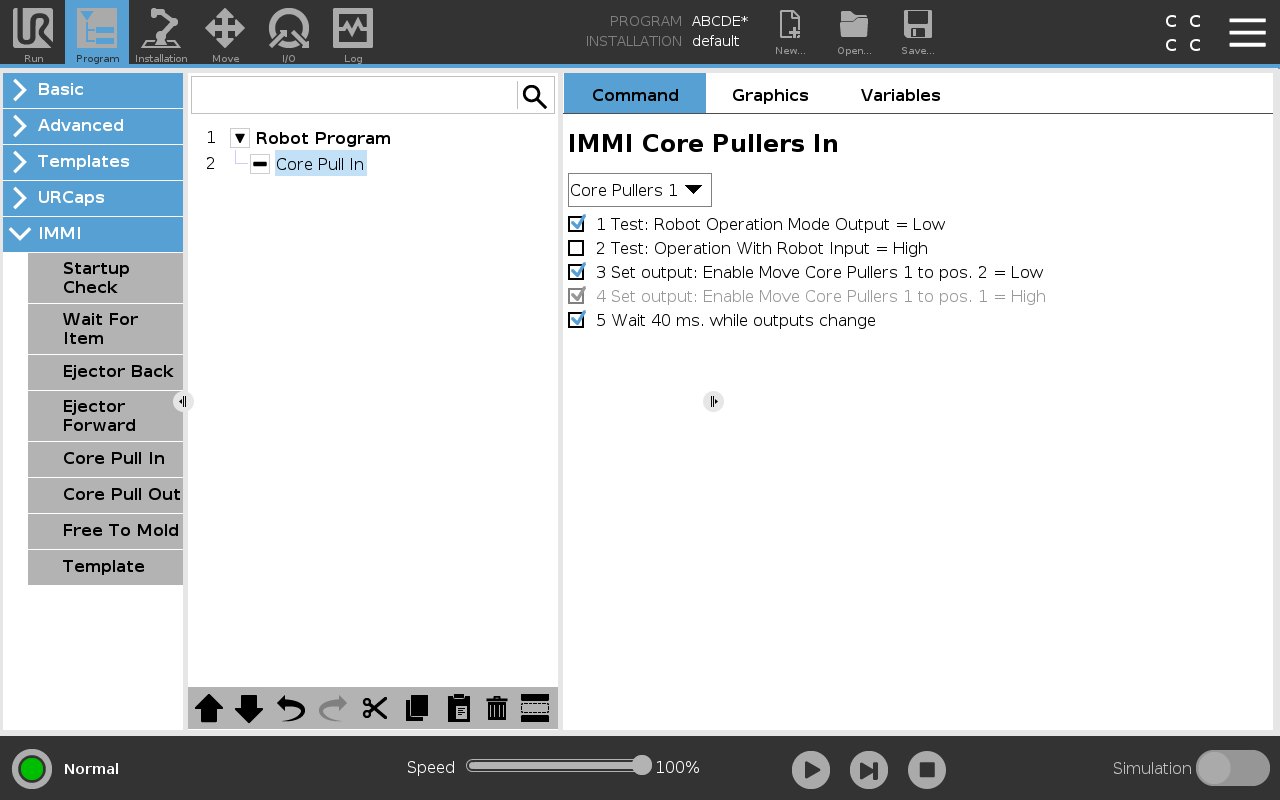
| コアプーラー 入 |
コアプーラーが 1 の位置に動くことを可能にします。 The core pullers used are selected from the drop down menu.
|
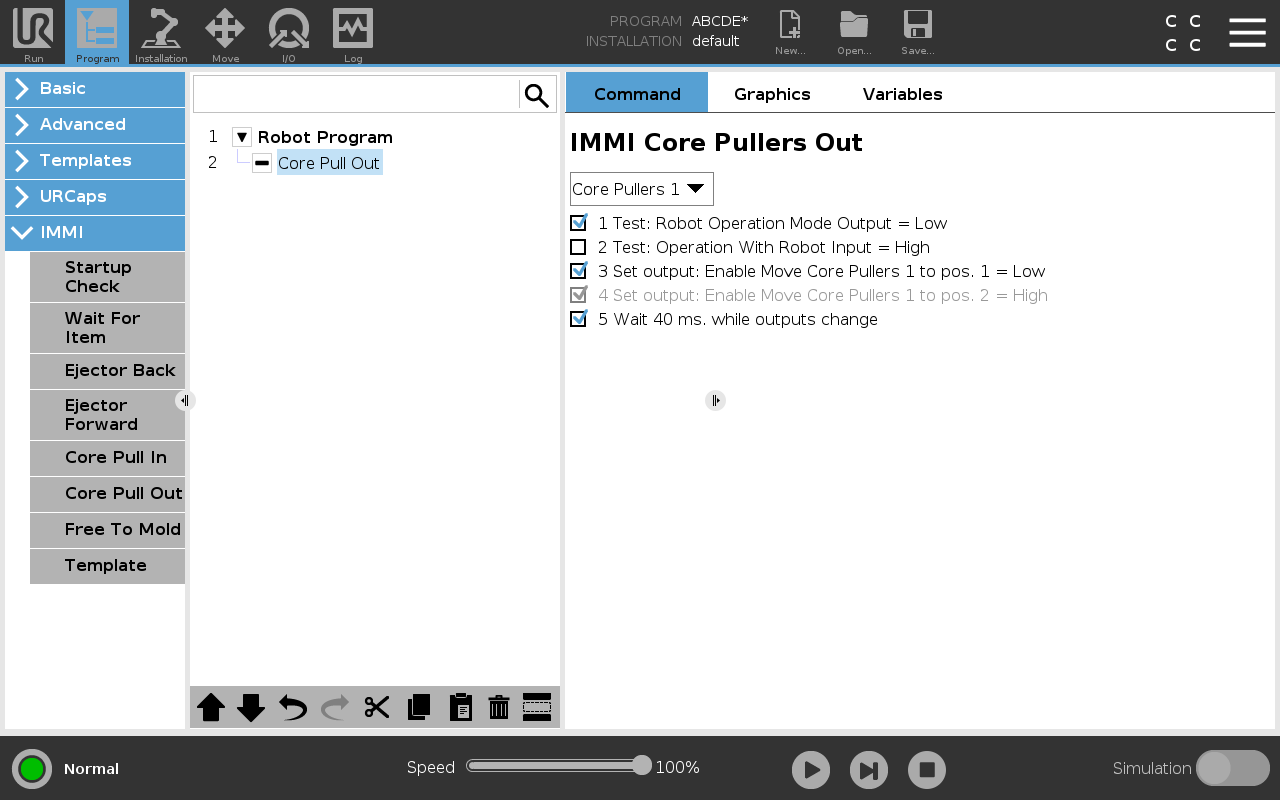
| コアプーラー 出 |
コアプーラーが 2 の位置に動くことを可能にします。 The core pullers used are elected from the drop down menu.
|
| 成形許可 |
成形動作を開始してよいことを IMM に通知します。 When this signal is activated, the robot must be placed outside the IMM.
|
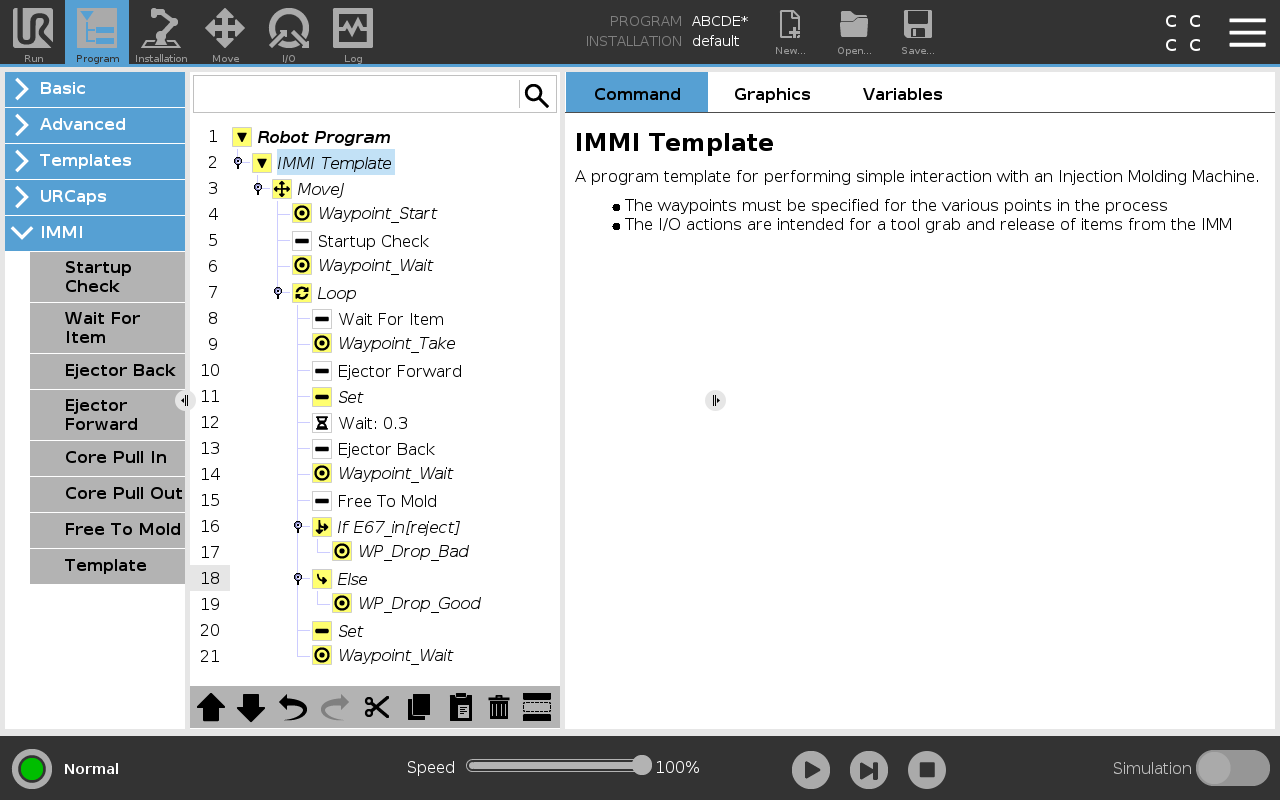
| テンプレート |
事前定義されたプログラム構造を使用して、IMM との基本的な連携を実行します。
|