| Slik bruker du IMMI-malen
|
- På PolyScope, i toppteksten, trykk på Program og velg IMMI.
- Select Template for the program screen to appear with the template
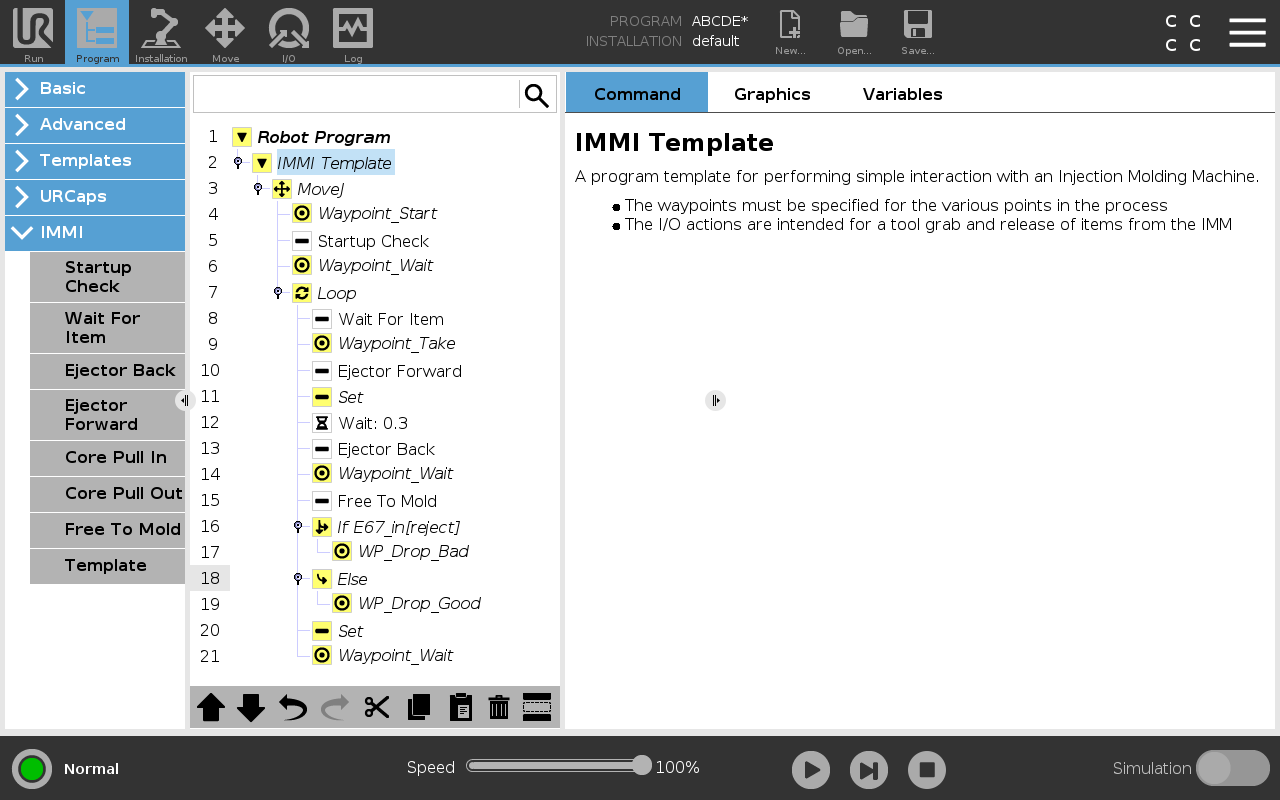
loaded. Malstrukturen er synlig på venstre side av skjermen, som illustrert nedenfor.
- For å forberede roboten til å håndtere objekter, velg ønskede vendepunkter blant følgende:
- Vendepunkt_Start: Robotarmens startpunkt før sprøyte-støpeprosessen begynner.
- Vendepunkt_Vent: Robotarmens ventepunkt.
- Vendepunkt_Fjern: Robotarmen fjerner et element fra IMM-punktet.
- VP_Dropp_Galt: Robotarmen frigjør avvist elementpunkt.
- VP_Dropp_Bra: Robotarmen frigjør godtatt elementpunkt.
- Velg og tilpass en av de følgende nodene for å kontrollere griperen:
- Angi: Bestem når verktøyet tar tak i og frigjør et element.
- Sløyfe: Kjør roboten kun når et element må fjernes fra IMM.
- MoveJ: Tilpass robotens bevegelseshastighet til å passe IMM-syklustiden.
- I Flytt-noden justerer du leddhastigheten og leddakselerasjonen for å imøtekomme elementets skjørhet.
|