IMMI I/U i vanlige programnoder
| Beskrivelse |
Dette avsnittet dekker hvordan man bruker IMMI-innganger og -utganger i vanlige programnoder. |
Bruk av IMMI I/U-oversikten
| Beskrivelse |
IMMI I/U-skjermen viser indikatorer for inngangssignaler og alternativer for styring av utgangssignaler. Alternativene for styring av utgangssignaler er, som standard, kun tilgjengelige i robotens programmeringsmodus. Dette kan omkonfigureres hvis ønskelig i I/U-konfigurasjonskategorien som du finner på Installasjonsskjermen. Ved oppstart er 24V-signalene høye. Alle andre signaler er lave. I automatisk modus er alle signaler høye som standard. |
IMMI I/U-oversikt
Kontroll |
Disse signalene brukes av programstrukturene til å kontrollere samspillet mellom roboten og IMM. |
|
|
| Status |
|
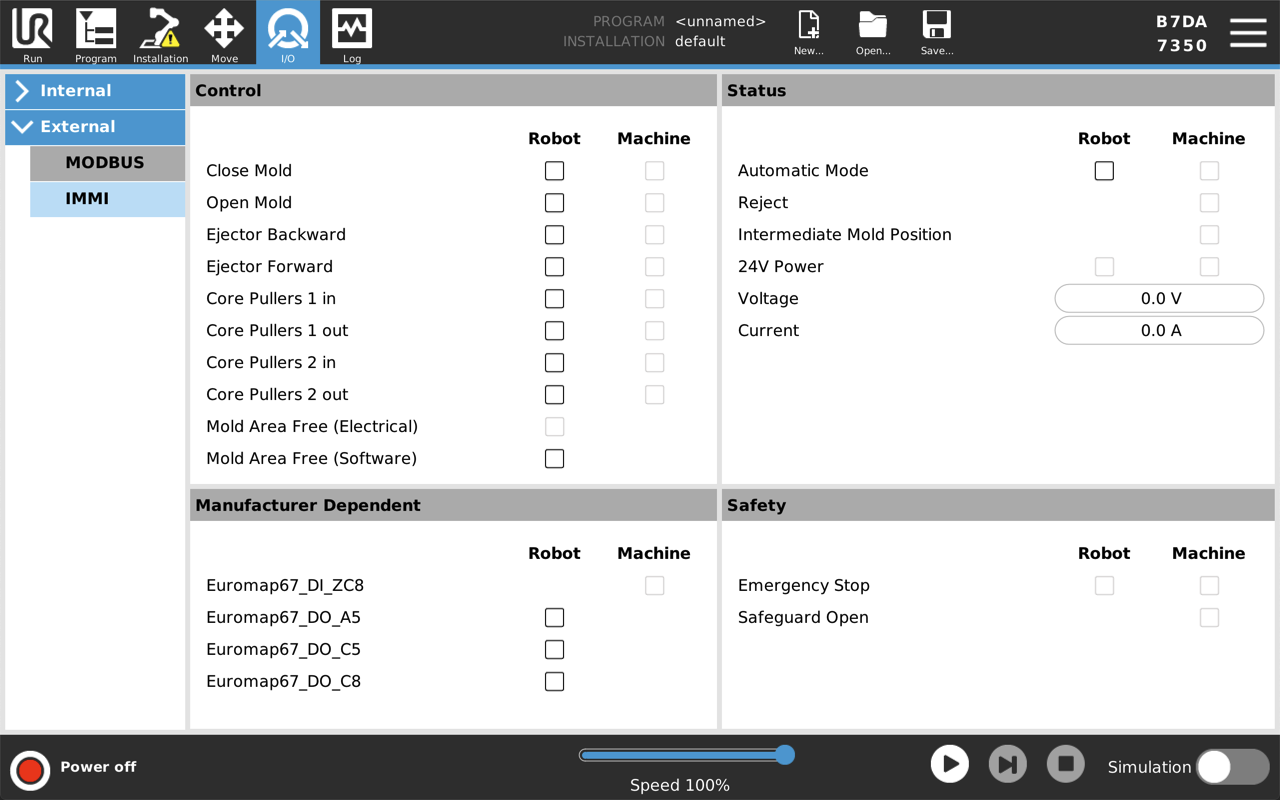
| Produsentavhengig |
Disse signalene er valgfrie, men kan brukes etter behov for spesifikke formål av IMM-produsenten. |
Sikkerhet |
Nødstoppindikatoren kan ikke styres via robotkolonneskjermen. Den indikerer at roboten har nødstoppet. Nødstoppsignalet fra maskinen angir om IMM er stoppet ved nødstopp. Vern åpen-inngangen viser tilstanden til «Sikkerhetsanordninger» -signalene som er angitt i EUROMAP 67-standarden. |
|
Hvis en programstruktur ikke inkluderer I/U-signaler, men likevel er ment for bruk i et robotprogram, kan du bruke Handling- og Vent-nodene beskrevet i følgende avsnitt. |
Slik bruker du IMMI I/U i vanlige programnoder
| Vent |
|
| Angi |
|
| Uttrykk |
Du kan få tilgang til Uttrykksredigering fra flere noder.
|