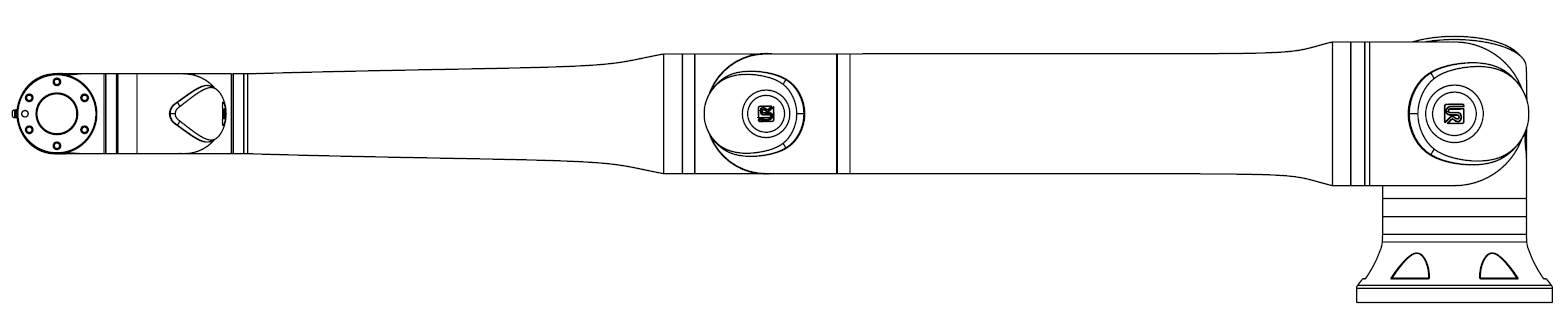
Rengjøring og inspeksjon av robotarm
| Beskrivelse |
Som en del av regelmessig vedlikehold kan robotarmen rengjøres i samsvar med anbefalingene i denne håndboken og lokale krav.
|
| Rengjøringsmetoder |
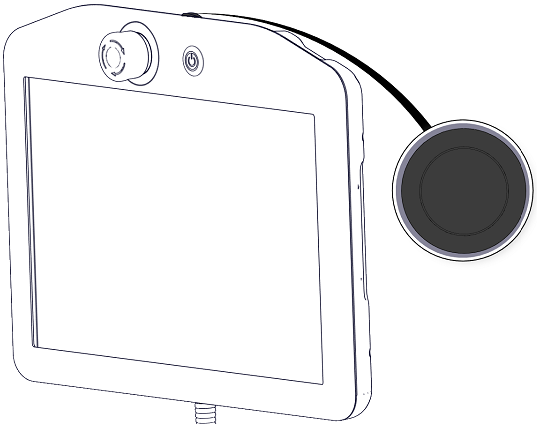
For å fjerne støv, smuss eller olje på robotarmen og/eller håndkontrollen, bruk ganske enkelt en klut i kombinasjon med et av rengjøringsmidlene nedenfor.
Overflatebearbeiding: Før bruk av løsningen ovenfor må overflatene tilberedes ved å fjerne løs jord og skitt.
Rengjøringsmidler:
Bruk: Løsningen påføres vanligvis på overflaten som trenger rengjøring ved hjelp av en sprayflaske, børste, svamp eller klut. Den kan påføres direkte eller fortynnes ytterligere, avhengig av graden av forurensning og typen overflate som rengjøres. Agitasjon: For krevende flekker eller svært skitne områder. Løsningen kan bearbeides med en børste, skrubb eller annen mekanisk innretning for å løsne forurensningen. Hviletid: Hvis det er nødvendig, kan løsningen hvile på overflaten i opptil fem minutter for å penetrere og løse opp miljøgiftene på en effektiv måte. Skylling: Etter hviletiden skylles overflaten vanligvis grundig med vann for å fjerne de oppløste forurensningene og eventuelle gjenværende rester av rengjøringsmidler. Det er viktig å sikre skylle grundig for å hindre at rester forårsaker skade eller utgjør en sikkerhetsfare. Tørking: Den rengjorte overflaten kan stå for å lufttørke eller tørkes med håndklær. IKKE BRUK BLEKEMIDLER i noen fortynnet rengjøringsløsning. |
|
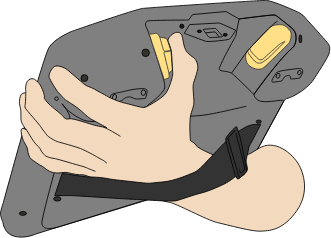
Fett er irriterende og kan forårsake en allergisk reaksjon. Kontakt, innånding eller svelging kan forårsake sykdom eller skade. For å forhindre sykdom eller skade, må du følge følgende:
|
| Inspeksjonsplan for robotarm |
Tabellen nedenfor er en sjekkliste med inspeksjonstypene anbefalt av Universal Robots. Utfør inspeksjoner regelmessig, som anbefalt etter tabellen. Enhver referert del som befinner seg i en uakseptabel tilstand må rettes eller utskiftes.
|
||||||||||||||||||||||||||||||||||||||||||||||||
Hvis det observeres skade på roboten innen garantiperioden, ta kontakt med distributøren som du kjøpte roboten fra.
|
| Inspeksjon |
|