| Gebruik van het IMMI-sjabloon
|
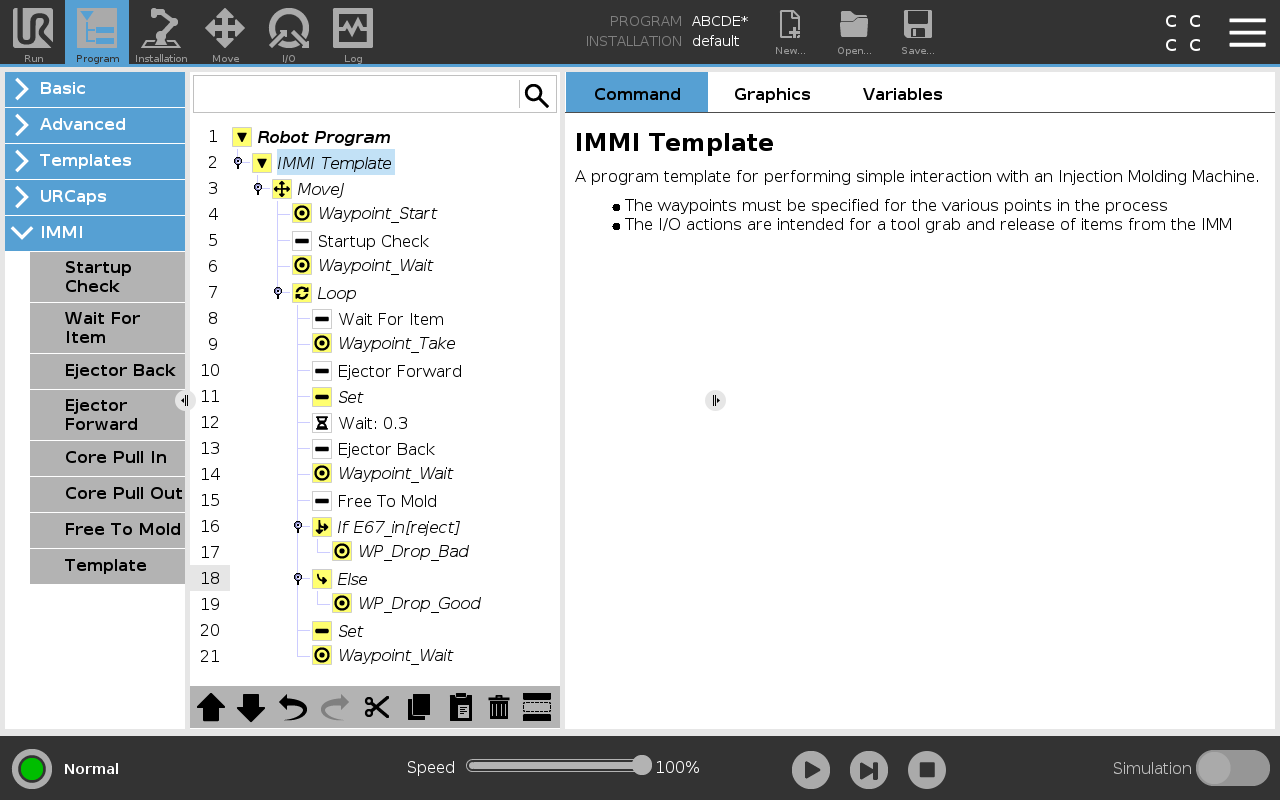
- Tik in PolyScope in de kop op Programma en selecteer IMMI.
- Select Template for the program screen to appear with the template
loaded. De sjabloonstructuur wordt links in het scherm weergegeven, zoals hieronder is afgebeeld.
- Om de robot voor te bereiden op het hanteren van objecten, selecteert u gewenste waypoints uit de volgende:
- Waypoint_starten: startpunt van de robotarm voordat het spuitgietproces begint.
- Waypoint_wachten: wachtpunt voor robotarm.
- Waypoint_pakken: robotarm verwijdert object van IMM-punt.
- WP_slechte_neerzetten: robotarmpunt voor loslaten geweigerde objecten.
- WP_goed_neerzetten: robotarmpunt voor loslaten geaccepteerde objecten.
- Selecteer en pas een van de volgende nodes aan om de grijper aan te sturen:
- Neerzetten: bepaal wanneer het gereedschap een object vastgrijpt en loslaat.
- Lus: laat de robot alleen lopen wanneer een object uit de IMM moet worden verwijderd.
- BewegenJ: pas de bewegingssnelheid van de robot aan de IMM-cyclustijd aan.
- Pas in de node Bewegen de Gewrichtssnelheid en Gewrichtsacceleratie aan naar gelang de breekbaarheid van objecten.
|