IMMI-I/O in reguliere programmanodes
| Beschrijving |
Dit hoofdstuk beschrijft het gebruik van IMMI-ingangen en -uitgangen in reguliere programmanodes. |
Gebruik van het IMMI-I/O-overzicht
| Beschrijving |
Het IMMI-I/O-scherm bevat indicatoren voor ingangssignalen en opties voor het regelen van uitgangssignalen. De opties voor het regelen van de uitgangssignalen zijn standaard alleen beschikbaar in de robotprogrammeermodus. Dit kan naar wens worden ingesteld op het tabblad I/O-instellingen in het scherm Installatie. Bij starten zijn de 24 V-signalen hoog. Alle andere signalen zijn laag. In de automatische modus zijn alle signalen standaard hoog. |
IMMI-I/O-overzicht
Regeling |
Deze signalen worden gebruikt door de programmastructuren om de interactie tussen de robot en de IMM te regelen. |
|
|
| Status |
|
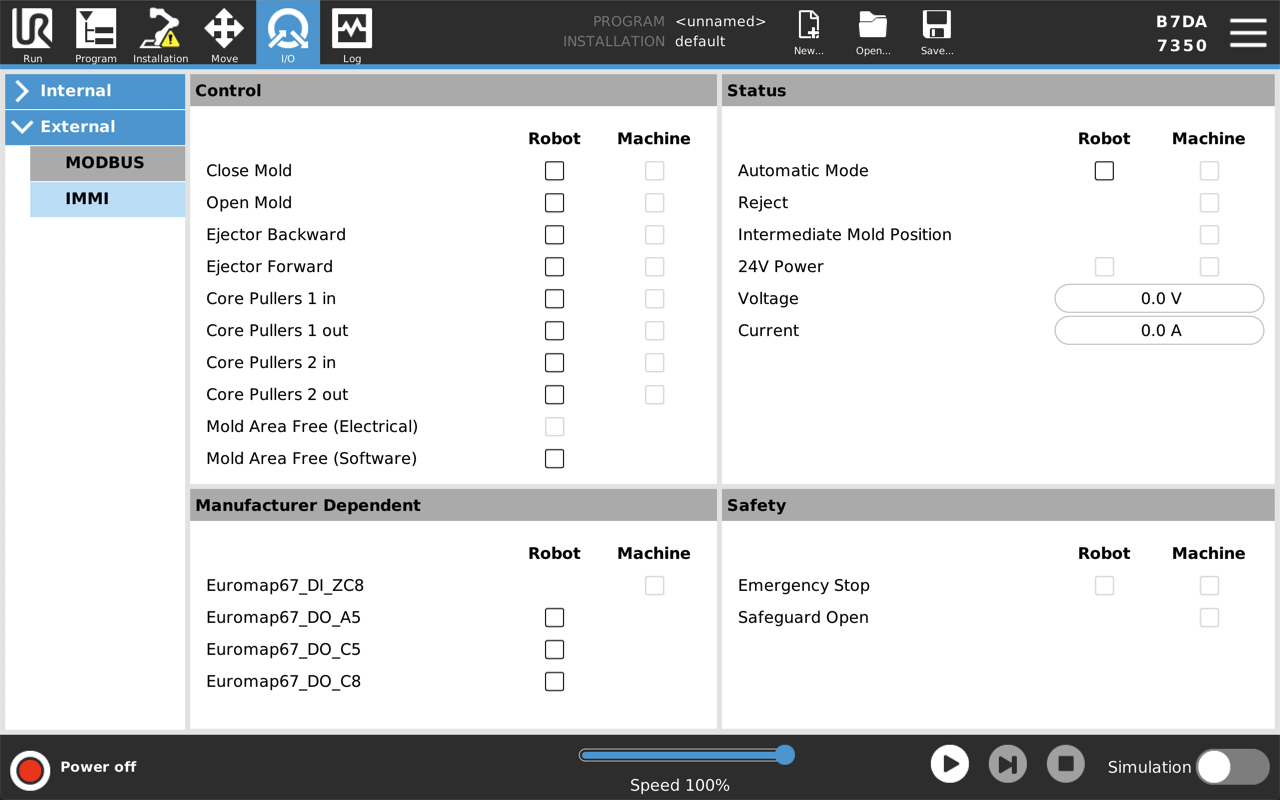
| Fabrikantspecifiek |
Deze signalen zijn optioneel, maar kunnen door de IMM-fabrikant naar behoefte worden gebruikt voor specifieke doeleinden. |
Veiligheid |
In de robotkolom kan de Noodstop-indicator niet vanuit dit scherm worden bediend. Deze geeft slechts aan dat de robot is noodgestopt. Het noodstopsignaal van de machine geeft aan of de IMM met een noodstop wordt gestopt. De ingang Beveiligd openen geeft de status van de "Veiligheidsapparatuur"-signalen aan die in de EUROMAP 67-norm worden genoemd. |
|
Als een programmastructuur geen I/O-signalen bevat, maar wel is bedoeld voor gebruik in een robotprogramma, kunt u de Actie- en Wachten-node gebruiken die in het volgende hoofdstuk worden beschreven. |
Gebruik van IMMI-I/O in reguliere programmanodes
| Wachten |
|
| Instellen |
|
| Expressie |
U kunt de Expressie-editor openen vanuit meerdere nodes.
|