| IMMI 템플릿을 사용하려면
|
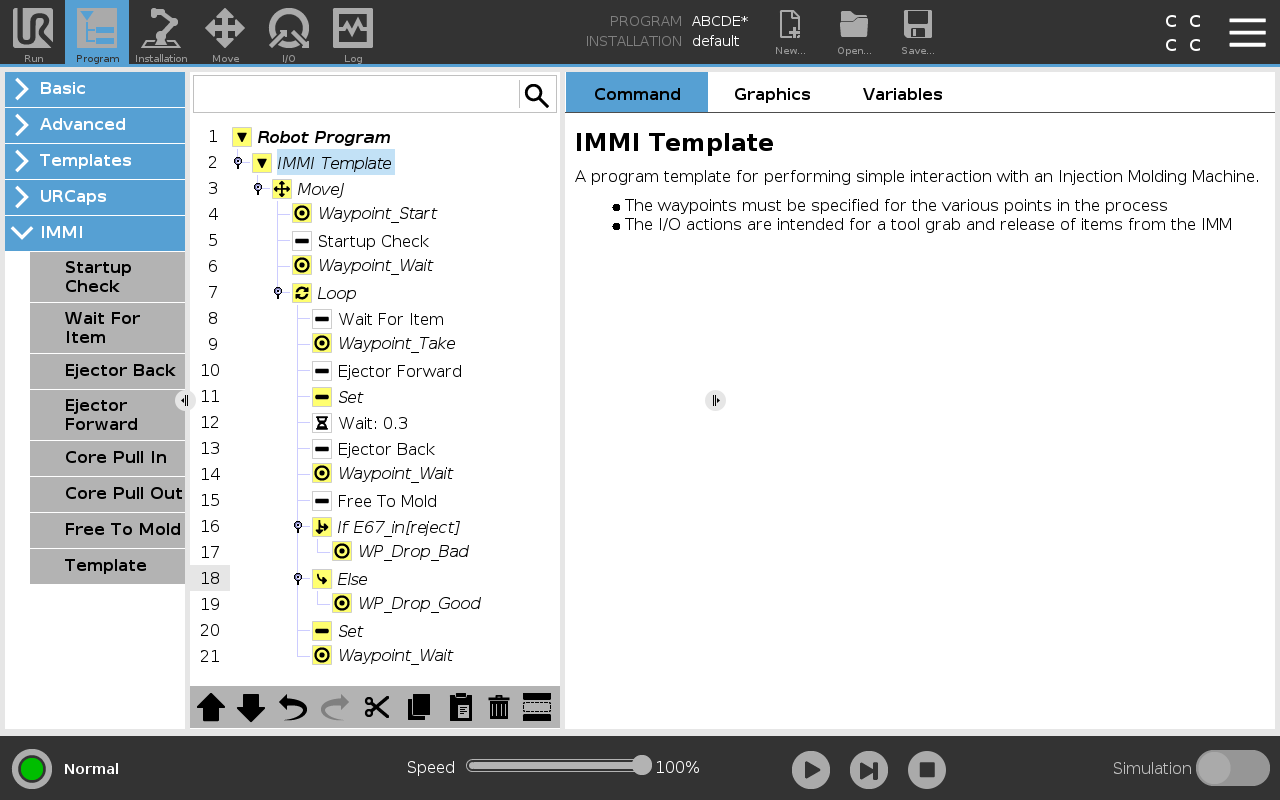
- PolyScope의 헤더에서 프로그램을 누르고 IMMI를 선택합니다.
- Select Template for the program screen to appear with the template
loaded. 아래 그림과 같이 템플릿 구조가 화면 왼쪽에 표시됩니다.
- 물체를 처리할 수 있도록 로봇을 준비하려면 다음에서 원하는 웨이포인트를 선택합니다.
- Waypoint_Start: 사출성형 프로세스가 시작되기 전 로봇 암 시작 포인트입니다.
- Waypoint_Wait: 로봇 암 대기 포인트입니다.
- Waypoint_Take: 로봇 암이 IMM 포인트에서 물체를 제거합니다.
- WP_Drop_Bad: 로봇 암이 거부된 물체 포인트를 해제합니다.
- WP_Drop_Good: 로봇 암이 수락된 물체 포인트를 해제합니다.
- 다음 노드 중 하나를 선택하고 사용자 지정하여 그리퍼를 제어합니다.
- 설정: 툴이 물체를 잡고 놓는 시기를 결정합니다.
- 루프: IMM에서 물체를 제거해야 할 때만 로봇을 실행합니다.
- MoveJ: IMM 사이클 타임에 맞게 로봇 이동 속도를 조정합니다.
- 이동 노드에서, 물체 경도에 맞도록 조인트 속도 및 조인트 가속도를 조정합니다.
|