로봇 암 청소 및 검사
| 설명 |
정기적 유지 보수의 일부로, 이 설명서의 권장 사항 및 현지 요구 사항에 따라 로봇 암을 청소할 수 있습니다.
|
| 청소 방법 |
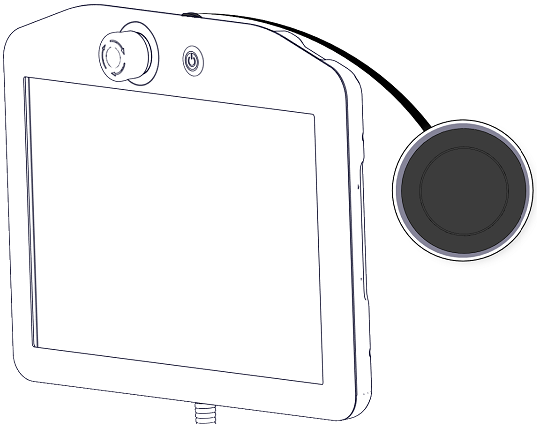
로봇 암 및/또는 티치 펜던트의 먼지, 오물 또는 오일을 제거하려면 아래에 제공된 세제 중 하나와 천을 사용하십시오.
표면 준비: 아래의 용액을 사용하기 전에 흩어져 있는 먼지나 이물질을 제거하여 표면을 준비해야 할 수 있습니다.
세제:
적용: 일반적으로, 스프레이 병, 브러시, 스폰지 또는 천을 사용하여 청소해야 하는 표면에 세제를 묻힙니다. 오염 수준과 세척할 표면의 유형에 따라 세제를 바로 묻히거나 좀 더 희석할 수 있습니다. 교반: 얼룩이 심하거나 상당히 더럽혀진 부위의 경우, 브러시, 스크러버 또는 기타 기계적 수단을 사용하여 용액을 교반하면 오염 물질을 완화할 수 있습니다. 유지 시간: 필요한 경우, 효과적으로 오염 물질을 침투하고 용해하기 위해 최대 5분 동안 표면에 세제를 묻힌 상태로 둘 수 있습니다. 헹구기: 유지 시간이 지나면, 일반적으로 물로 표면을 완전히 헹궈서, 용해된 오염 물질과 남은 세제 잔여물을 제거합니다. 잔여물로 인해 손상되거나 안전 위험을 초래하지 않도록 완전히 헹궈야 합니다. 건조: 마지막으로, 청소한 표면을 공기 건조시키거나 수건을 사용하여 건조시킬 수 있습니다. 희석한 세제에 표백제를 사용하지 마십시오. |
|
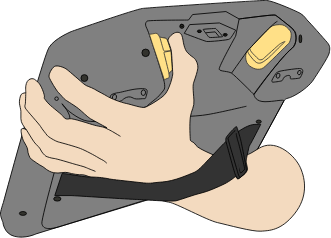
그리스는 자극성이 있으며 알레르기 반응을 일으킬 수 있습니다. 접촉, 흡입 또는 섭취 시 질병이나 부상을 유발할 수 있습니다. 질병이나 부상을 방지하기 위해 다음 사항을 준수하십시오.
|
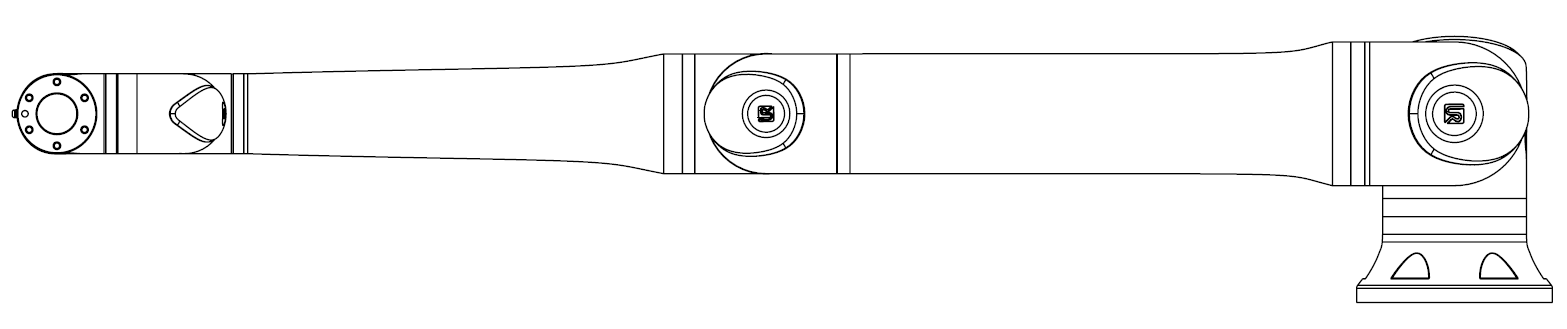
| 로봇 암 검사 계획 |
아래 표는 Universal Robots에서 권장하는 검사 유형의 체크리스트입니다. 표에서 권장하는 대로 정기적으로 검사를 수행하십시오. 허용되지 않는 상태로 나오는 참조 파트는 수정 또는 교체해야 합니다.
|
||||||||||||||||||||||||||||||||||||||||||||||||
보증 기간 내에 로봇의 손상이 확인되면 로봇을 구입한 대리점에 문의하십시오.
|
| 검사 |
|