일반 프로그램 노드의 IMMI I/O
| 설명 |
이 섹션에서는 일반 프로그램 노드에서 IMMI 입출력을 사용하는 방법에 대해 설명합니다. |
IMMI I/O 사용 개요
| 설명 |
IMMI I/O 화면은 입력 신호용 표시기 및 출력 신호 제어용 옵션을 제공합니다. 출력 신호 제어용 옵션은 기본적으로 로봇 프로그래밍 모드에서만 사용 가능합니다. 설치 화면에 나오는 I/O 설정 탭에서 원하는 대로 재구성할 수 있습니다. 가동 시, 24V 신호는 높음입니다. 기타 모든 신호는 낮음입니다. 자동 모드에서는 기본적으로 모든 신호가 높음입니다. |
IMMI I/O 개요
제어 |
이 신호는 로봇과 IMM 간의 상호작용을 제어하기 위해 프로그램 구조에서 사용합니다. |
|
|
| 상태 |
|
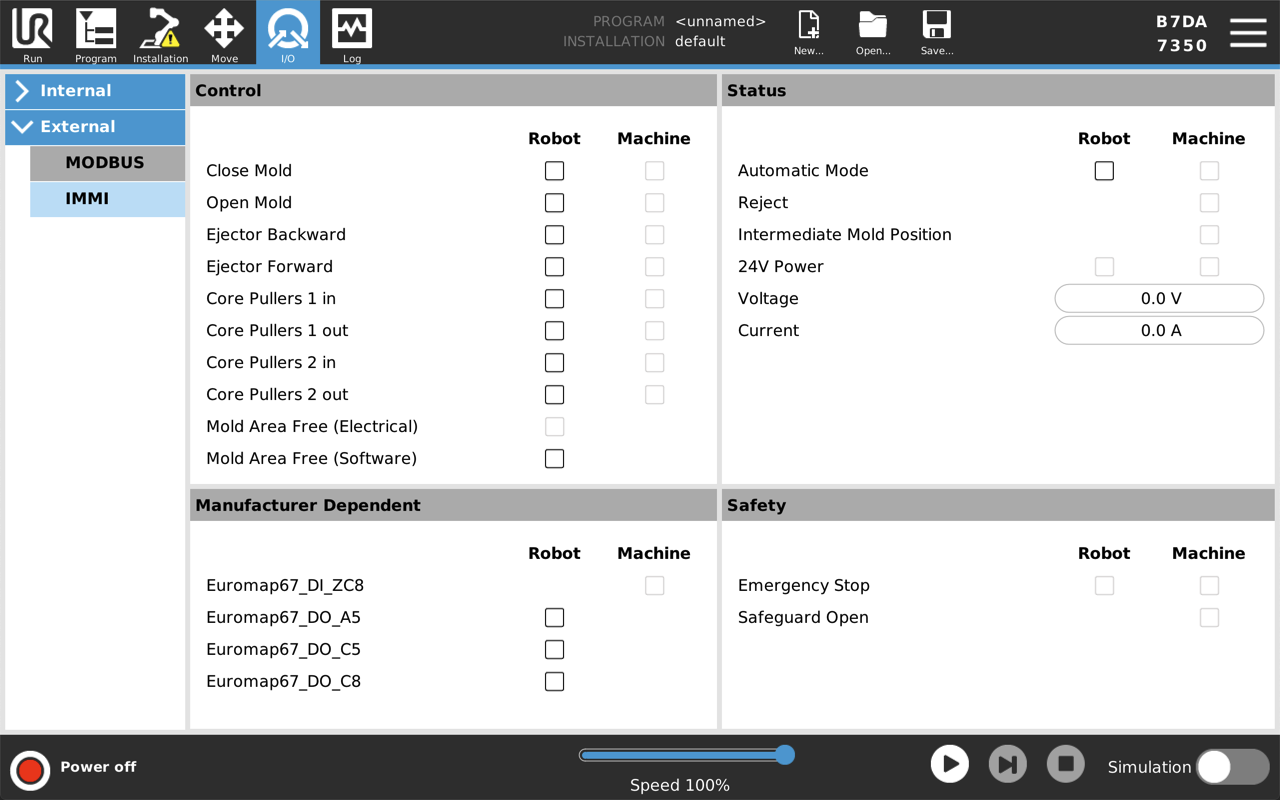
| 제조사별로 다름 |
이러한 신호는 선택적이며, IMM 제조사에 의해 특정 목적을 위해 필요에 따라 사용될 수 있습니다. |
안전 |
로봇 칼럼에서 비상 정지 표시기는 이 화면으로 제어할 수 없습니다. 단순히 로봇이 비상 정지되었음을 나타냅니다. 기계의 비상 정지 신호는 IMM이 비상 정지했는지 표시합니다. 세이프가드 개방 입력은 EUROMAP 67 표준에서 지정된 "안전 장치" 신호 상태를 표시합니다. |
|
프로그램 구조에 I/O 신호가 포함되어 있지 않지만, 로봇 프로그램에서 사용하기 위한 용도인 경우, 다음 섹션에 설명된 작업 및 대기 노드를 사용할 수 있습니다. |
일반 프로그램 노드에서 IMMI I/O를 사용하는 방법
| 기다림 |
|
| 설정 |
|
| 표현식 |
여러 노드에서 표현식 편집기에 액세스할 수 있습니다.
|