E/S de IMMI en nodos del programa normal
| Descripción |
En esta sección se describe cómo usar entradas y salidas de IMMI en nodos de programa normal. |
Información general sobre el uso de la E/S de la IMMI
| Descripción |
La pantalla de E/S de la IMMI brinda indicadores para señales de entradas y opciones para controlar las señales de salida. Las opciones para controlar las señales de salida, por defecto, solo están disponibles en el modo de programación del robot. Esto puede reconfigurarse como se desee en la pestaña Config. E/S de la pantalla Instalación. Al arrancar, las señales de 24 V están altas. El resto de las señales están bajas. En modo Automático, todas las señales están altas de forma predeterminada. |
Información general sobre E/S de IMMI
Control |
Estas señales son usadas por las estructuras del programa para controlar la interacción entre el robot y la IMM. |
|
|
| Estado |
|
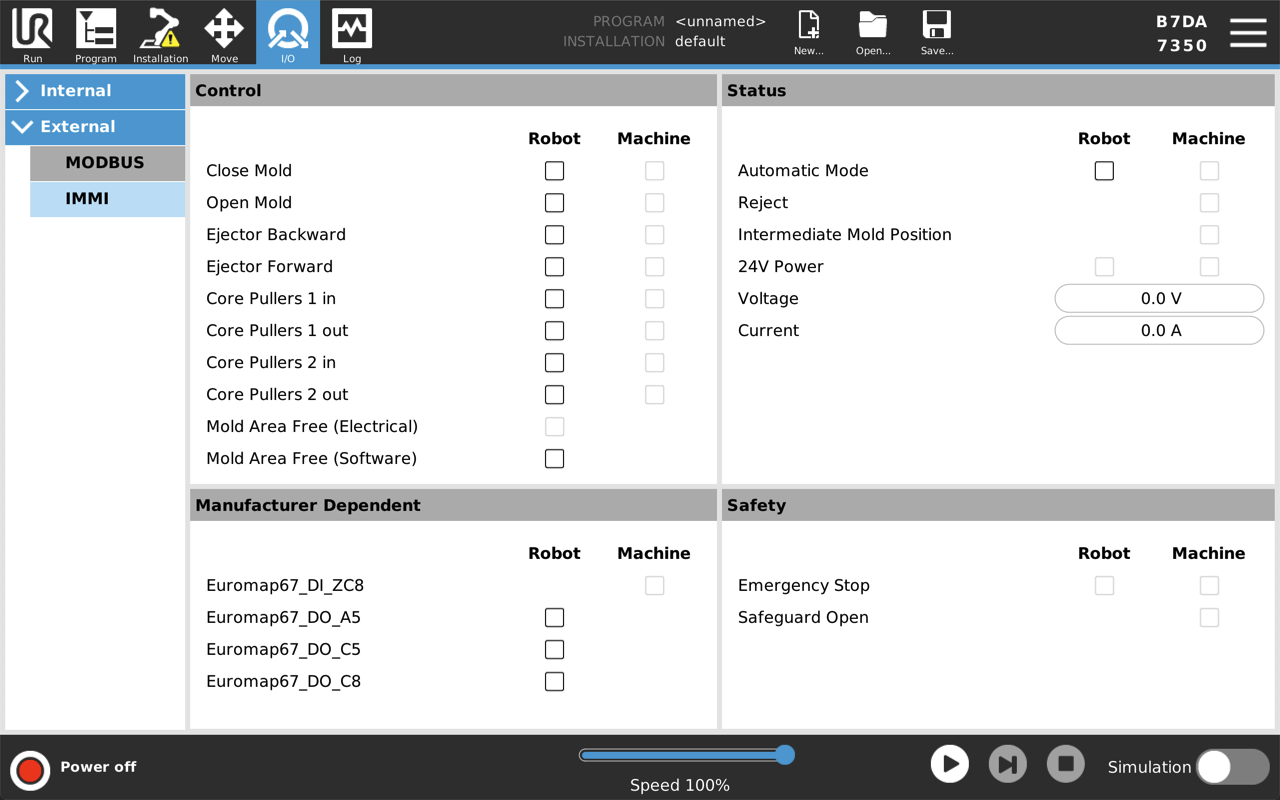
| Depende del fabricante |
Estas señales son opcionales, pero el fabricante de la IMM podría usarlas, si fuera necesario, para determinados fines. |
Seguridad |
En la columna del robot, el indicador de Parada de emergencia no puede controlarse desde esta pantalla. Simplemente indica que el robot está en parada de emergencia. La señal de parada de emergencia de la máquina indica si la IMM está en parada de emergencia. La entrada Protección abierta muestra el estado de las señales de «Dispositivos de seguridad» especificadas en la norma EUROMAP 67. |
|
Si en la estructura del programa no se incluyen las señales de E/S, pero igualmente está pensada para usarse en un programa de robot, puede usar los nodos Acción y Espera que se describen en la sección siguiente. |
Cómo usar la E/S de IMMI en nodos del programa normal
| Esperar |
|
| Establecer |
|
| Expresión |
Puede acceder al Editor de expresión desde varios nodos.
|