PROFIsafe
| Description |
The PROFIsafe network protocol (implemented as version 2.6.1) allows the robot to communicate with a safety PLC according to ISO 13849, Cat 3 PLd requirements. The robot transmits safety state information to a safety PLC and receives commands to reduce safety limits or trigger a safety-related function such as an emergency stop. The PROFIsafe interface provides a safe, network-based alternative to connecting wires to the safety IO pins of the robot control box. PROFIsafe is only available on robots that have an enabling license, which you can obtain by contacting your local sales representative. After you obtain the license, download it from myUR. For information about robot registration and license activation, see Robot Registration and License File.
|
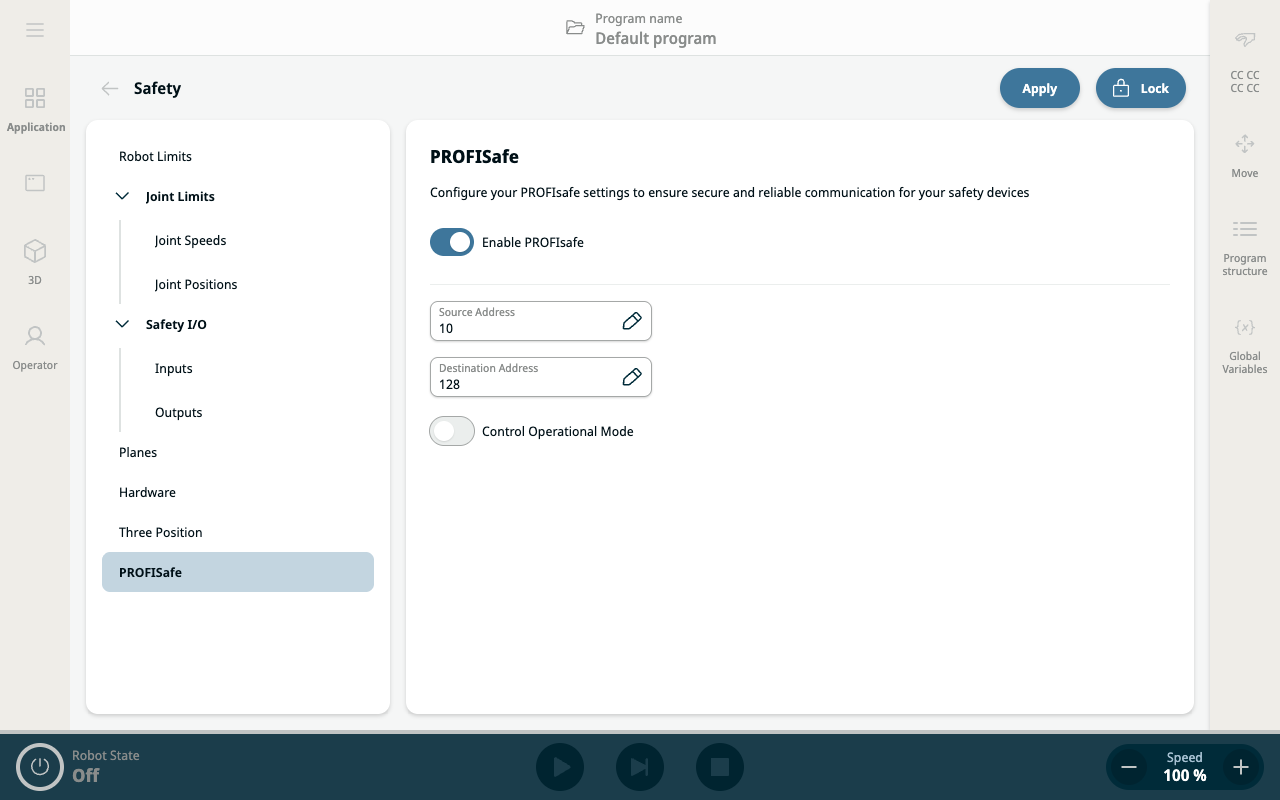
| Configuring PROFIsafe |
|
|
|
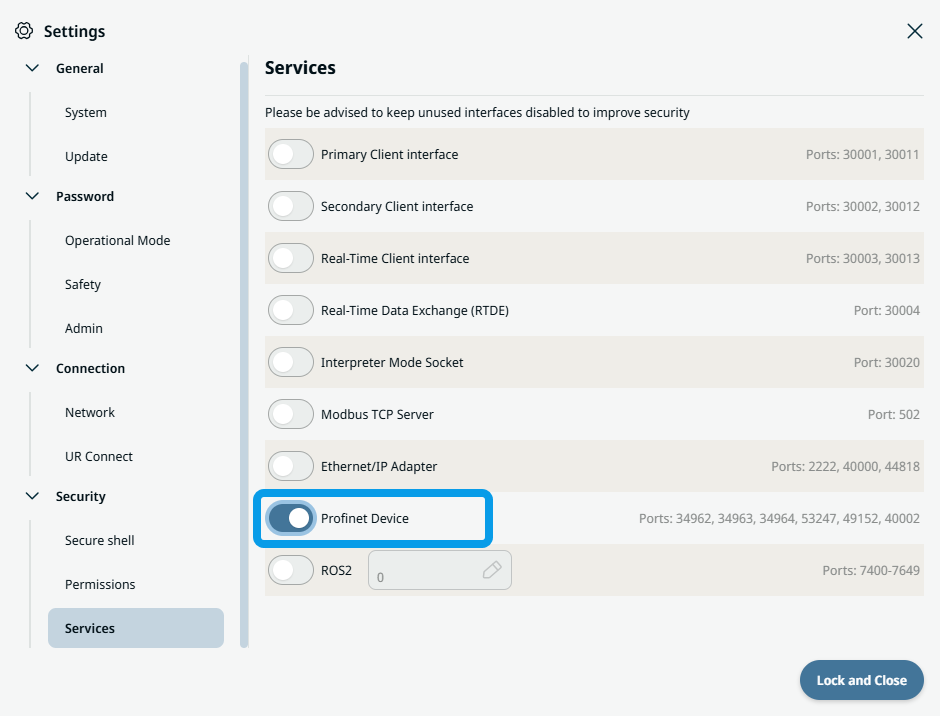
In order to configure and use PROFIsafe, Profinet Device must be enabled in the security services settings menu.
 Read for details and interface location PROFINET Device.
|