Pick and Place
| Description |
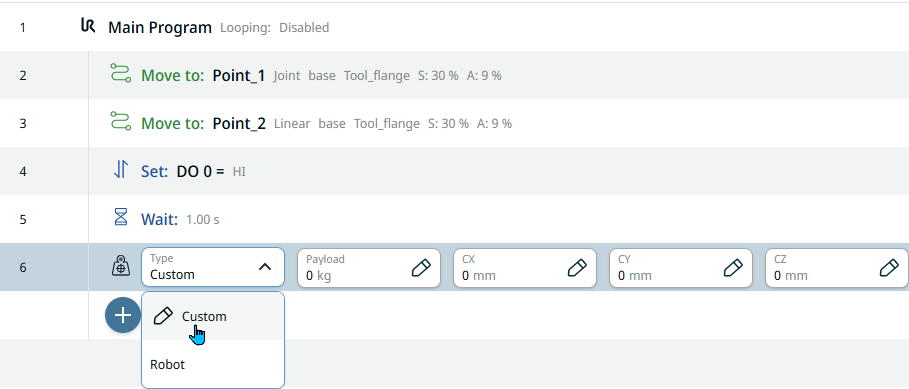
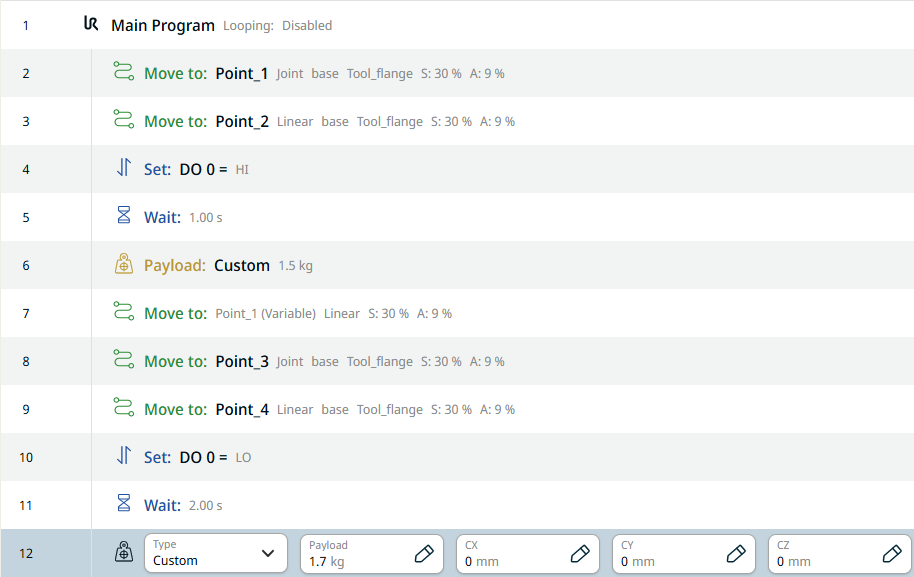
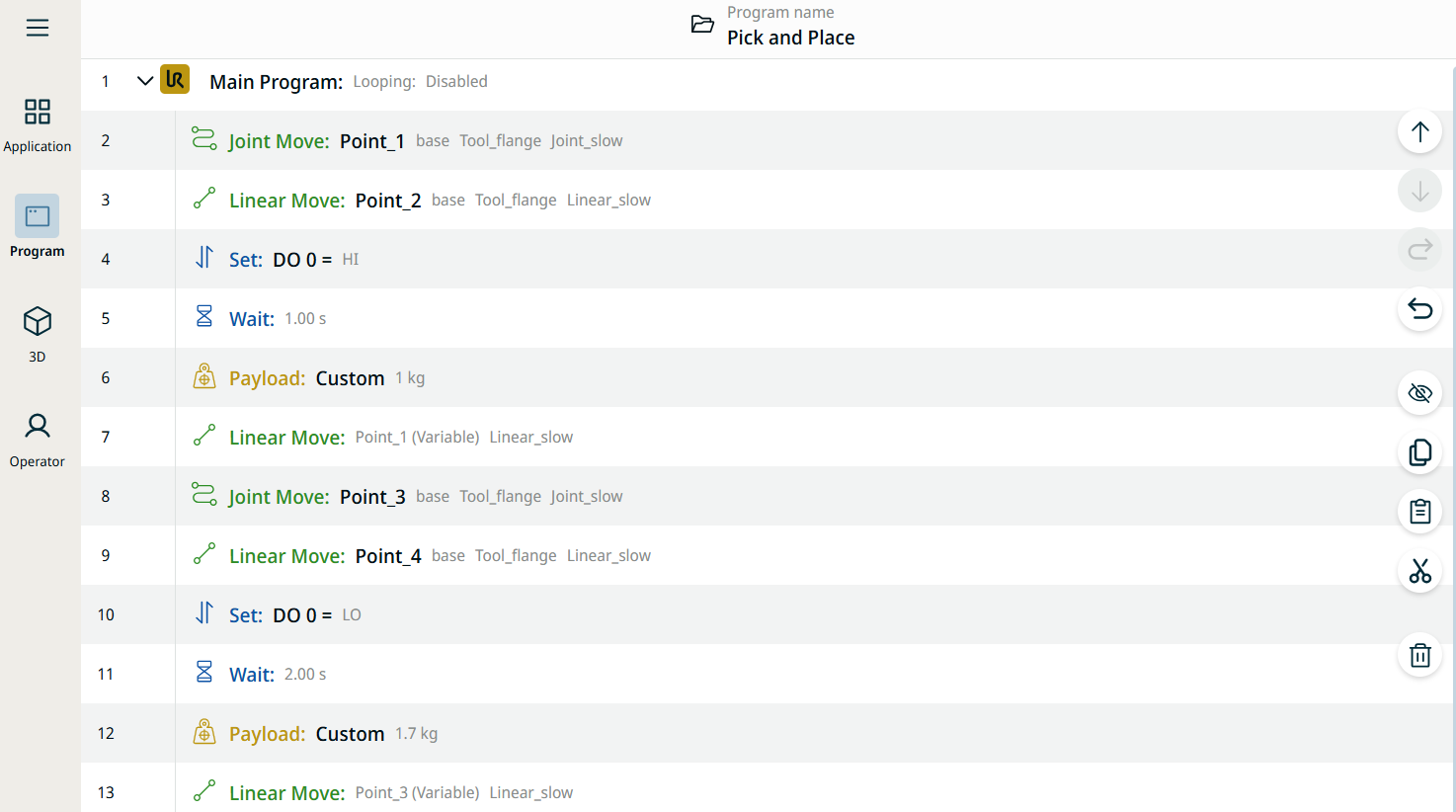
Pick and place is used when a robot picks up a piece from a tray or fixture and places it again in another tray or fixture. In a pick and place program, you create a default payload in the installation. Then you add a Set Payload when picking up an object. You update the payload after the gripper closes but before starting to move. Additionally, you use the Set Payload after the object has been released.
|
|
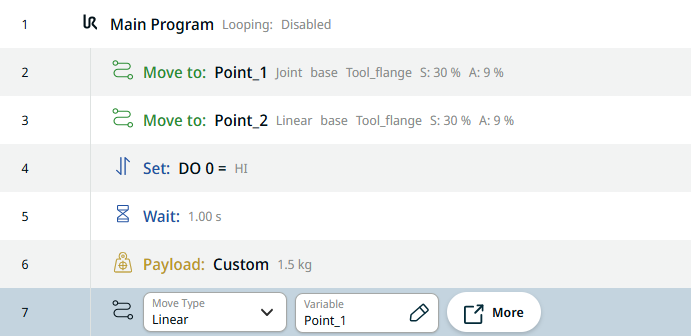
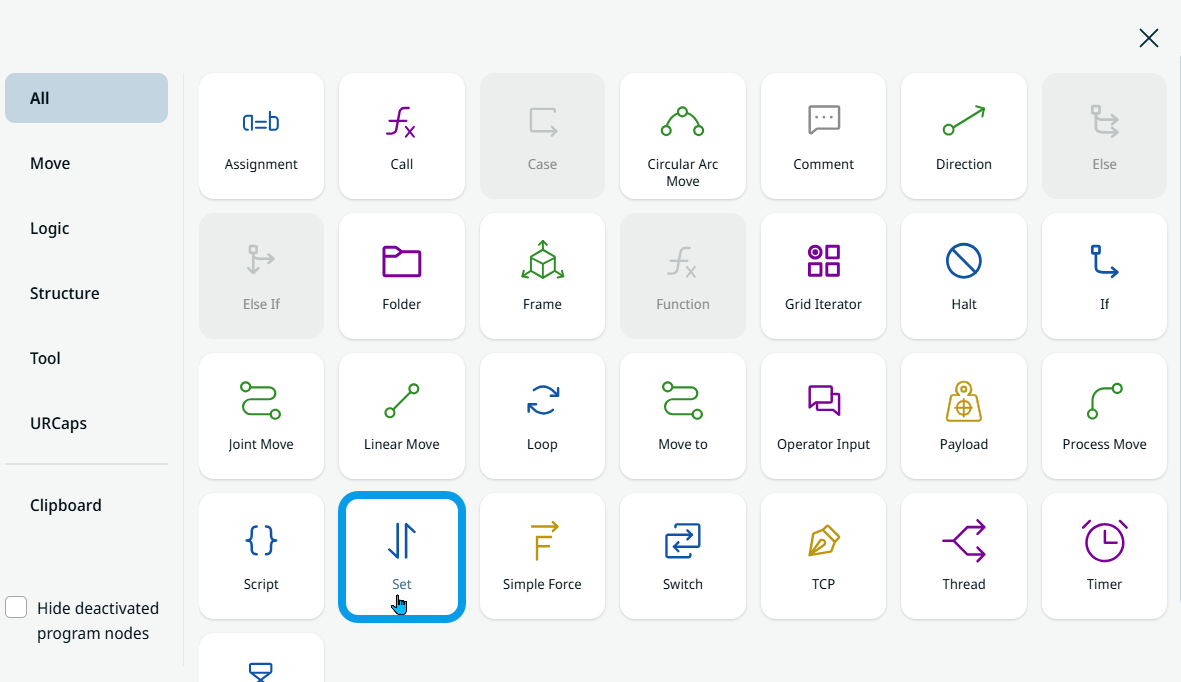
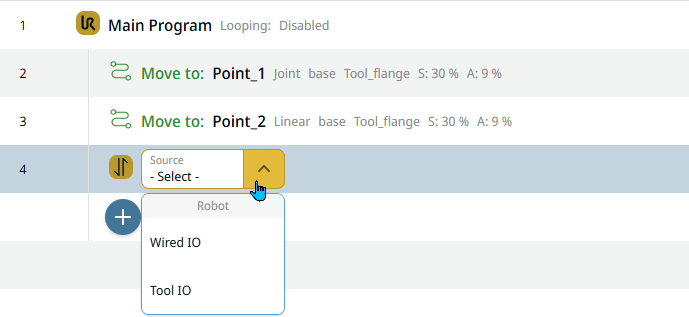
Creating a Pick-and-Place program |
|
|
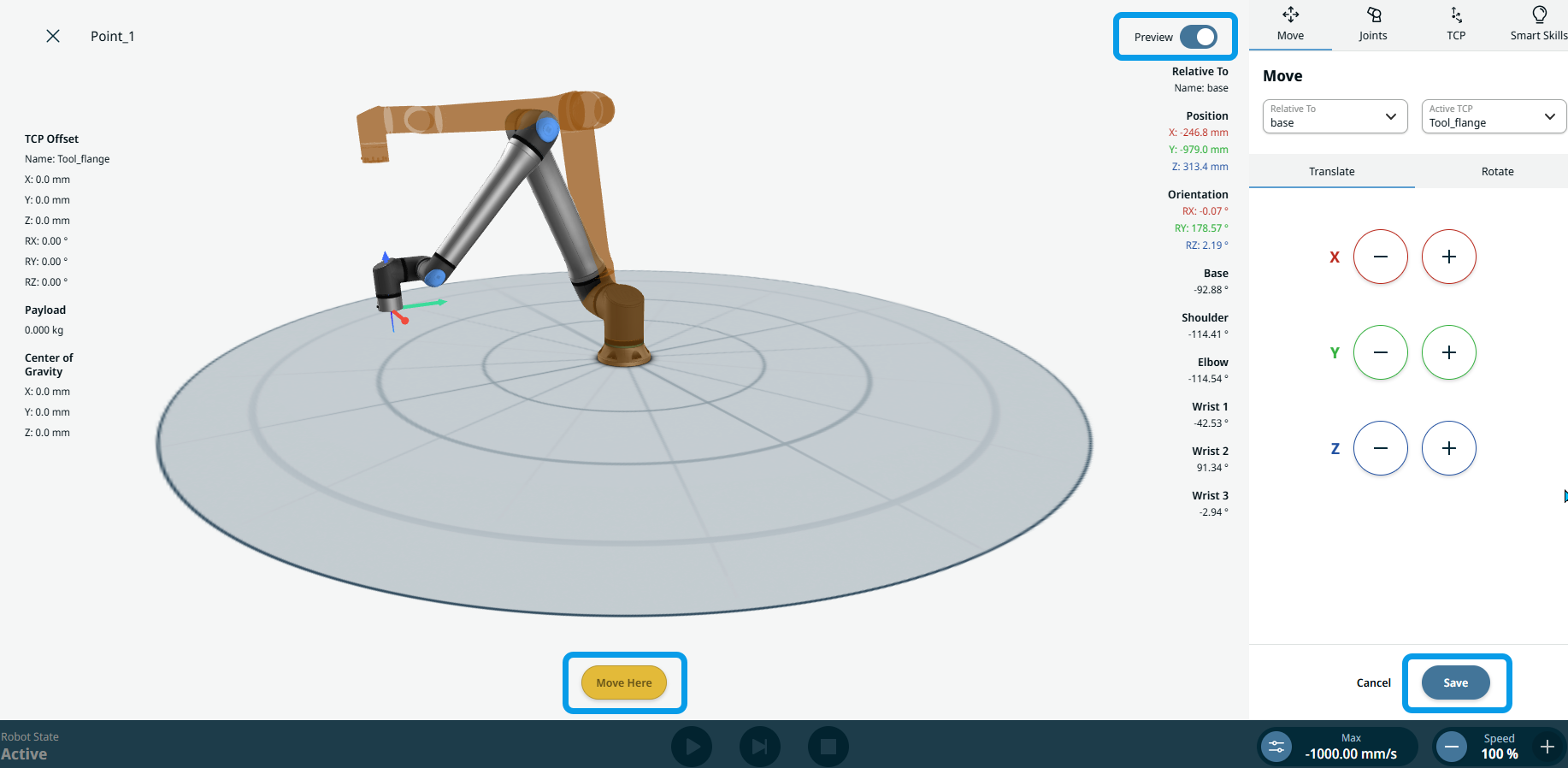
Position the robot above a tray/fixture |
|
|
Robot grabs a thing from a tray/fixture |
|
|
|
|
|
|
|
|
|
|
|
Robot moves to the point above a tray/fixture |
|
|
Robot reaches the end of a tray/fixture |
|
|
Robot places a picked thing |
|
|


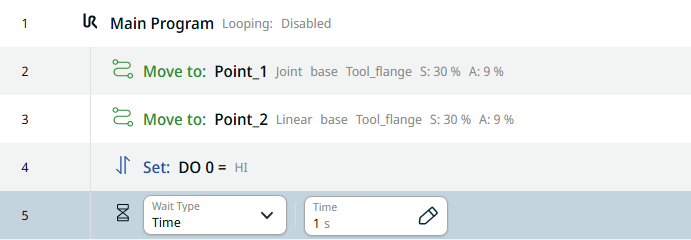
 Choose Time in the Wait Type field and enter 1 in the Time field.
Choose Time in the Wait Type field and enter 1 in the Time field.