First Program
| Description |
The first program creation in PolyScope X enables you to teach the robot arm how to move using a series of waypoints to set up a path for it to follow.
|
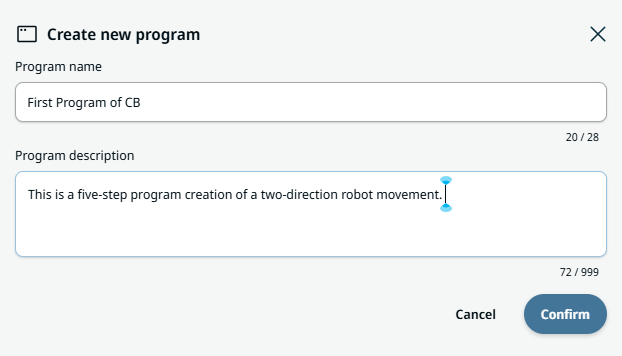
| To create a simple program |
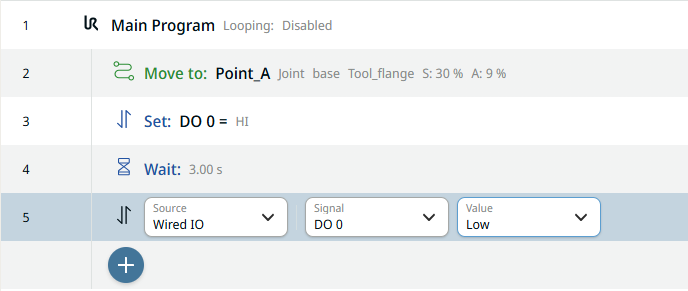
For this simple program, you (1) move to position A using a joint move type, (2) set an IO, (3) wait for 3 seconds, (4) unset the IO, (5) move to position B using again a joint move type, and (6) repeat the movement.
|
|
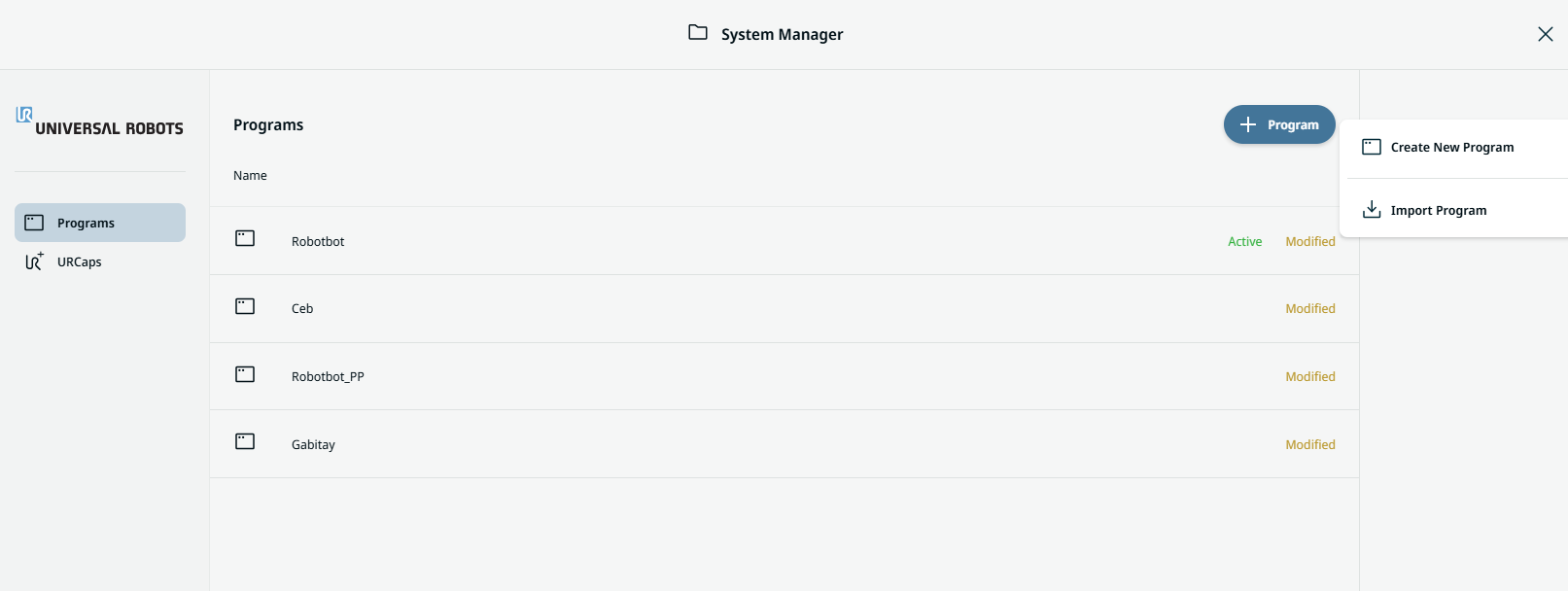
System Manager access |
|
|
|
| Initialize Robot |
|
|
|
|
|
Move to |
|
|
|
|
|
Name the first waypoint |
|
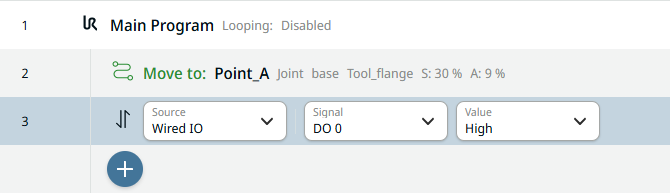
| Set an IO |
|
|
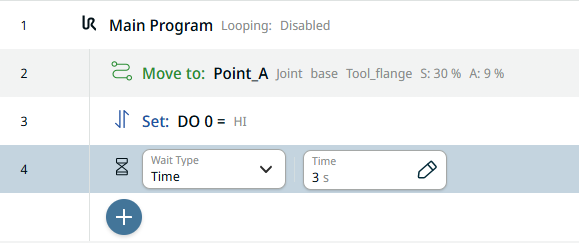
Insert |
|
|
Unset |
|
|
Move to |
|
|
Name the second waypoint |
|
|
Verify program in 3D viewer and Communication application |
|
|
|
|
Keep your head and torso outside the reach (workspace) of the robot. Do not place fingers where they can be caught. |