I/O Setup
| Description |
The I/O are divided between inputs and outputs and are paired up so that each function provides a Category 3 and PLd I/O.
When starting programs from an I/O or fieldbus input, the robot can begin movement from the position it has, there will not be any manual movement to the first waypoint via PolyScope required. |
| Input Functions |
|
| Input Functions |
If the robot is stopped while using the Start input function, the robot slowly moves to the first waypoint of the program before executing that program. If the robot is paused while using the Start input action, the robot slowly moves to the position from where it was paused before resuming that program.
|
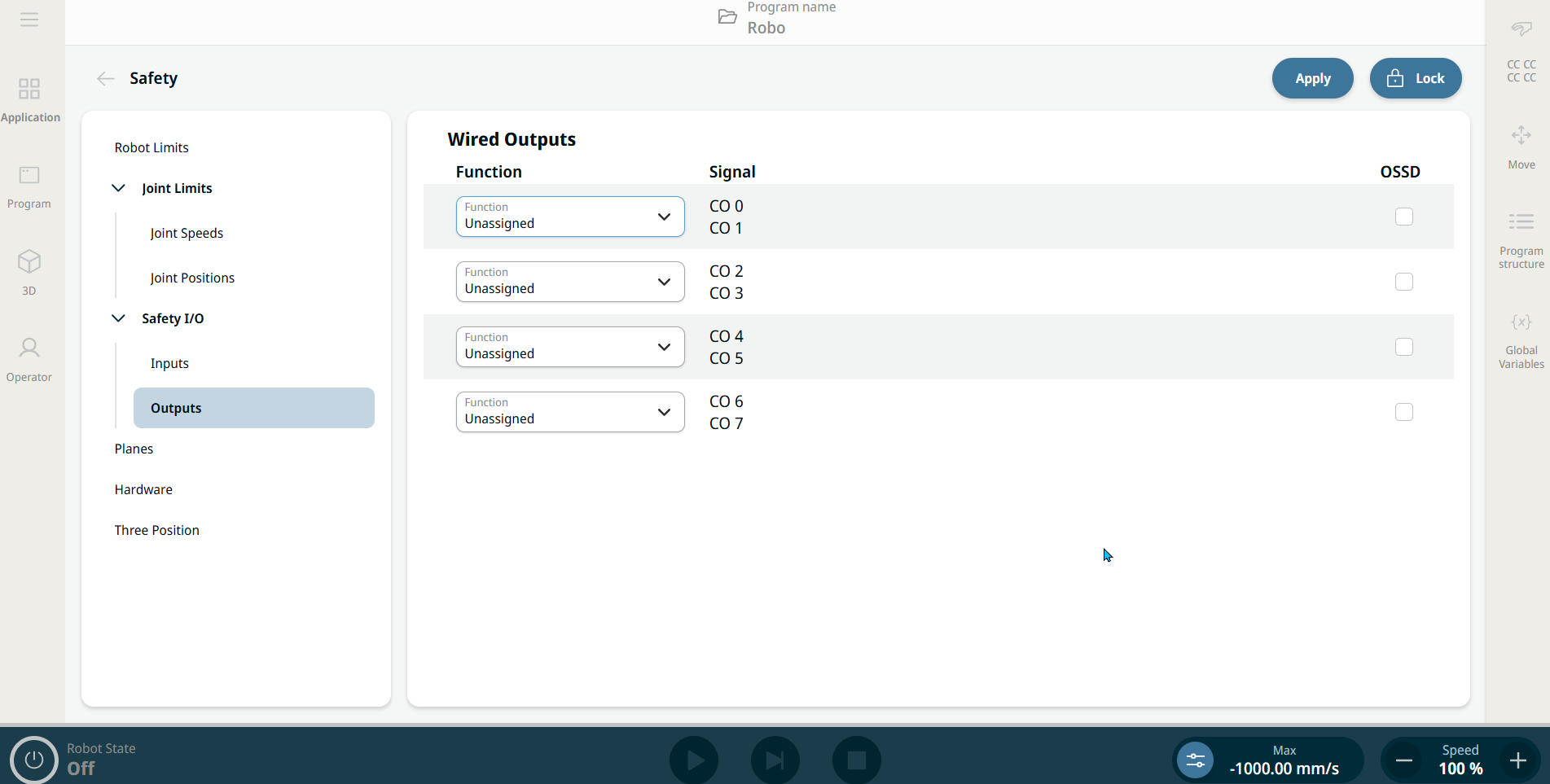
| Output Functions |
|