
Release note Software version 10.12.x. Japanese
日本語訳:リリースノート ソフトウェアバージョン 10.12.X ※対象機種: e-Series および UR-Series
PolyScope 5 の最新のリリースノートはこちらをご参照ください。 Release note Software version 5.25.x.x
リリース日: 2026年1月30日
ダウンロードは こちらから
SW 10.12.0 リリースノート
リリースバージョン:
- PolyScope X ロボットイメージ: 10.12.0
- URCap X SDK: 変更無し
- ユーザーマニュアル: 10.12.0
主な特長
-
リニア移動ノードおよびジョイント移動ノードに「ここへ移動」ボタンを追加
-
Moveノードにモーションプロファイルのラベルを表示
-
安全設定におけるティーチングペンダント選択に「なし」オプションを追加
-
ログメッセージをサイドバー表示機能として追加
-
「バージョン情報」ダイアログを追加
-
リスト部クランプに関する安全設定および安全制限UIの変更
-
URCapsからツール設定を制御可能に
-
PROFIsafe(ライセンス機能)
-
PROFINET機能の更新
-
ジョイント交換後のジョイント検証手順
-
セーフホーム位置
-
ロジックプログラム(ベータ版のみ)
互換性に関する注意事項
PolyScope X(全バージョン)は、コントロールボックス バージョン5.6(CB5.6)のみ対応しています。
コントロールボックスのバージョンを確認するには、製品のシリアル番号ラベルをご確認ください。モデル名に「CB5.6」と明記されています。記載されているバージョンがCB5.6ではない場合、またはバージョンの記載がない場合は、お使いのコントロールボックスはPolyScope Xに対応していません。PolyScope X対応ロボットとして購入されたにもかかわらず、正しいコントロールボックスでない可能性がある場合は、状況確認のためUniversal Robotsまでご連絡ください。
現在販売中のすべてのUniversal Robots機種に対応したPolyScope Xアップグレードキットをご用意しています。詳細については、Universal Robotsまたはお近くのUniversal Robotsパートナーまでお問い合わせください。
重要なお知らせ:ソフトウェアバージョン10.12へのアップグレードについて
ソフトウェアバージョン10.12から以前のバージョンへのダウングレードはサポートされていません。本番環境へアップグレードする前に、互換性および安定性を十分に検証されることを強く推奨します。
PolyScope X ユーザーインターフェース
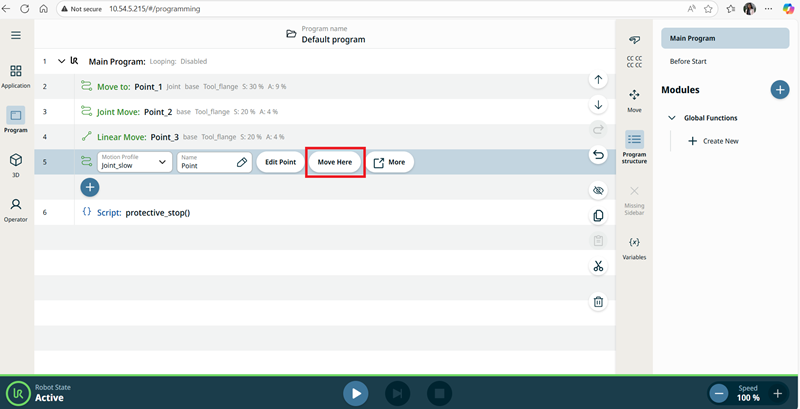
リニア移動ノードおよびジョイント移動ノードに「ここへ移動」ボタンを追加
Move(移動)ノードに「ここへ移動」ボタンを追加しました。プログラムツリー上から直接、該当ノードの位置へロボットアームを移動できます。
「ここへ移動」ボタンを押すと、「ロボットを指定位置へ移動」ダイアログが表示されます。
本ボタンは、ウェイポイントがティーチ済みの場合に表示されます。
また、ロボットが通常モードまたは低速モードのときのみ有効になります。
Moveノードにモーションプロファイルを表示
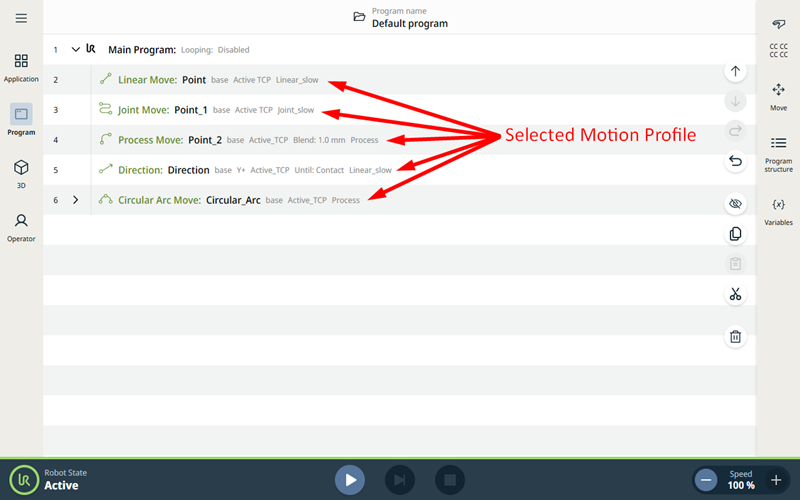
プログラムツリー内のMove(移動)ノードに、各ノードに関連付けられているモーションプロファイルを表示するようになりました。
これにより、選択されているモーションプロファイルを一目で確認できます。
カスタムのモーションプロファイルを使用しているMoveノードでは、モーションプロファイル名の代わりに、設定された速度および加速度の値が表示されます。
本機能は、以下の5種類のMoveノードに適用されています。
-
リニア移動
-
ジョイント移動
-
プロセス移動
-
方向移動
-
円弧移動
ティーチングペンダント未接続時の安全設定
概要:
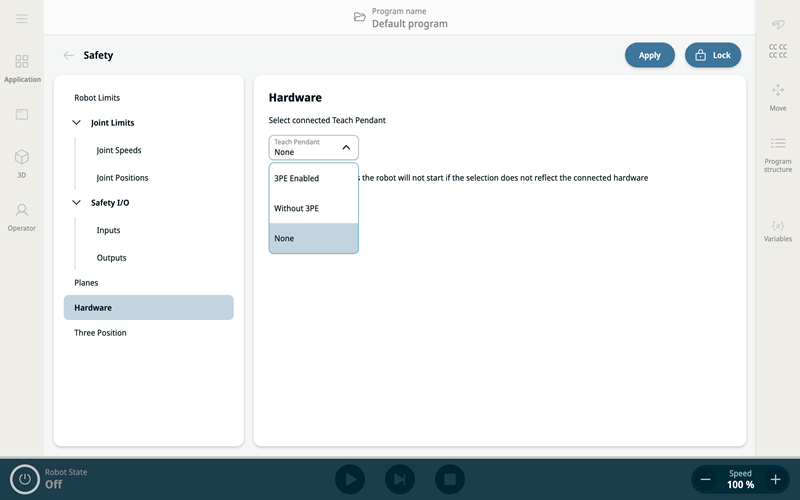
安全設定の「ハードウェア」セクション内にあるティーチングペンダント選択項目へ、新たに「None(なし)」オプションを追加しました。
これにより、コントロールボックスにティーチングペンダントを接続していない状態でも、安全にロボットの電源を投入できます。
URシリーズのロボットの場合は、新しい安全設定を適用する前に、外部の3ポジションイネーブル装置を設定する必要があります。
目的:
本機能は、ティーチングペンダントが不要、または物理的に接続されていない構成を想定したものです。特に、自動化環境やリモート制御環境において、より簡潔で柔軟な導入を可能にします。
主な利点:
-
ティーチングペンダントを使用しないヘッドレス構成に対応
-
最小構成におけるハードウェア要件を簡素化
-
ティーチングペンダントの接続有無に依存しない起動を実現
使用方法:
-
「安全」>「ハードウェア」>「ティーチングペンダント選択」へ移動します。
-
選択肢から「None(なし)」を選びます。
-
(URシリーズのみ)3ポジションスイッチを設定します。
-
「安全」>「安全I/O」>「入力」へ移動
-
「3ポジションスイッチ」を選択
-
-
設定を保存し、適用します。
-
これで、ティーチングペンダントを接続していない状態でもロボットの電源投入が可能になります。
サイドバーでのログメッセージ表示
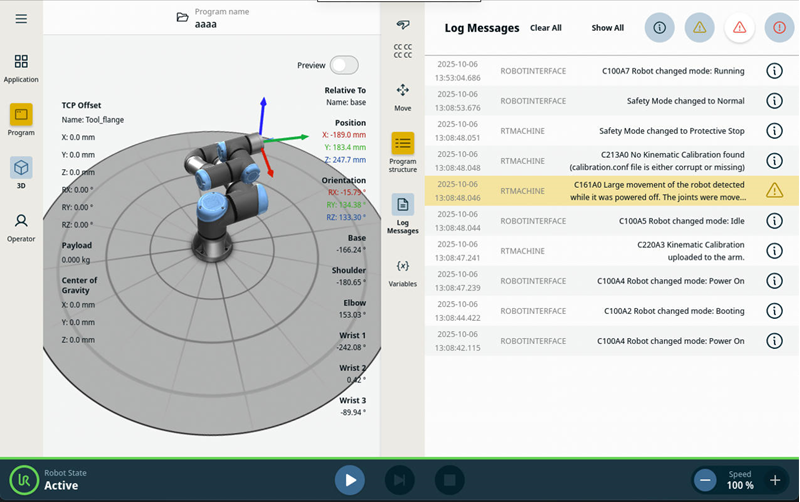
サイドバーでログメッセージを表示できるようになりました。この機能は、手動モードおよび自動運転モードの両方で有効化できます。
有効化するには、
Application > Sidebar > Log Messages にて、三点メニュー(︙)をクリックし、「Activate in Sidebar」 を選択してください。
有効化すると、サイドバーに新しいボタンが表示されます。
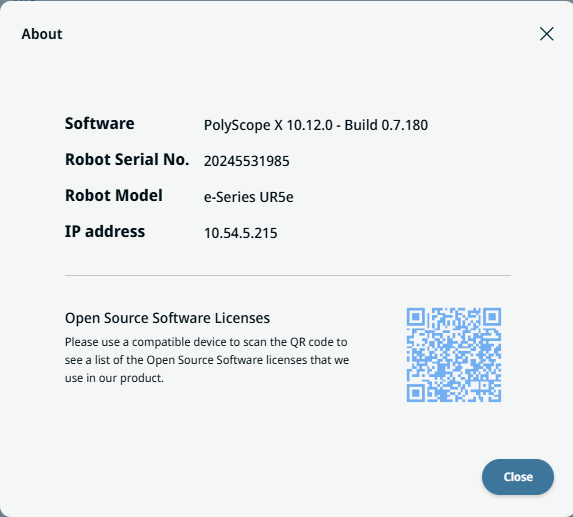
About ダイアログについて
About ダイアログに、マーケティングバージョンとベースラインバージョンの両方を含む、完全なソフトウェアバージョンが表示されるようになりました。
さらに、本ダイアログにはロボットのモデル名および IP アドレスも表示されるようになり、重要なシステム情報を素早く確認できるようになっています。
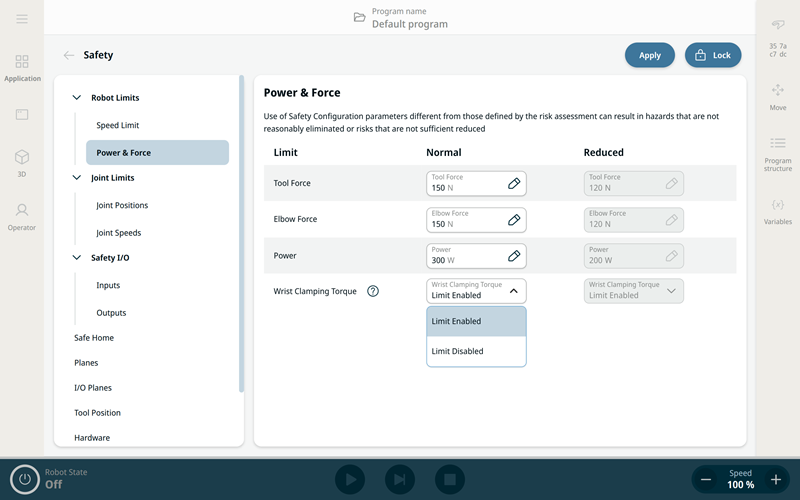
リストクランプ時の安全機能および制限値の設定画面の変更
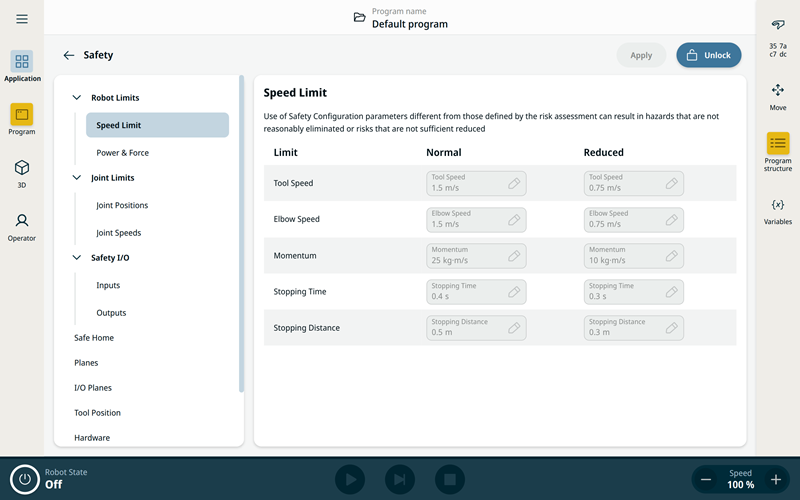
リストクランプ時のトルク制限
動力・力制限 に、新たに Wrist Clamping Torque(リストクランプトルク) を有効/無効にする設定が追加されました。デフォルトでは有効になっています。
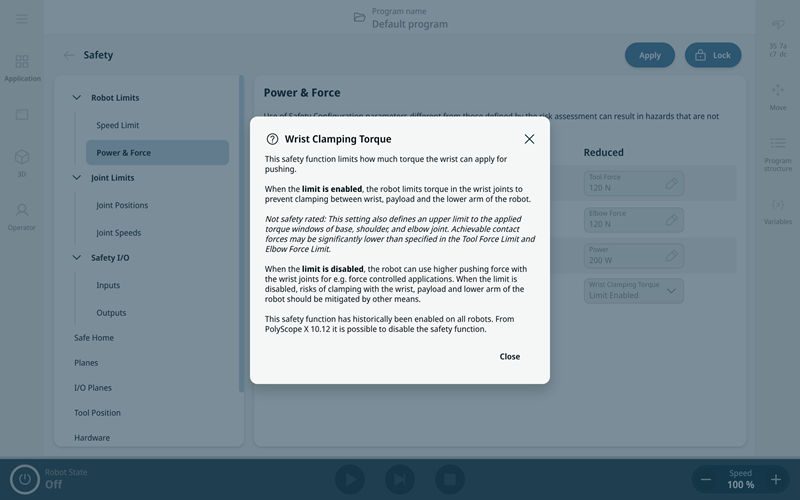
この安全機能は、押し付け動作時にリストが発生できるトルク量を制限します。
有効時
このリミットを有効にすると、ロボットはリスト関節のトルクを制限し、リスト・ペイロード・ロボット下腕部の間での挟み込みを防止します。
※安全認証(Safety rated)ではありません:本設定は、ベース・ショルダー・エルボー関節における適用トルクウィンドウの上限も定義します。そのため、実際に達成可能な接触力は、ツールフォースリミットやエルボーフォースリミットで指定された値より大幅に低くなる場合があります。
無効時
このリミットを無効にすると、力制御アプリケーションなどで、リスト関節を用いたより大きな押し付け力を使用できます。ただし、リスト・ペイロード・下腕部での挟み込みリスクは、他の手段で低減する必要があります。
本安全機能はこれまで全てのロボットで常に有効でしたが、PolyScope X 10.12 以降では無効化が可能になりました。
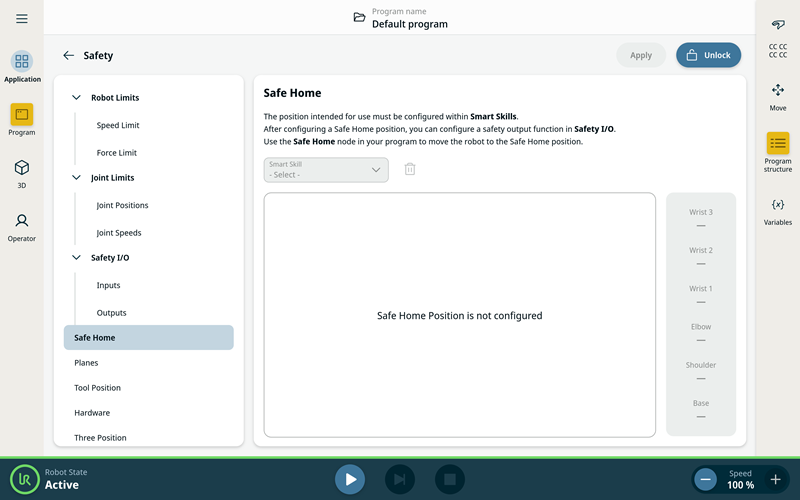
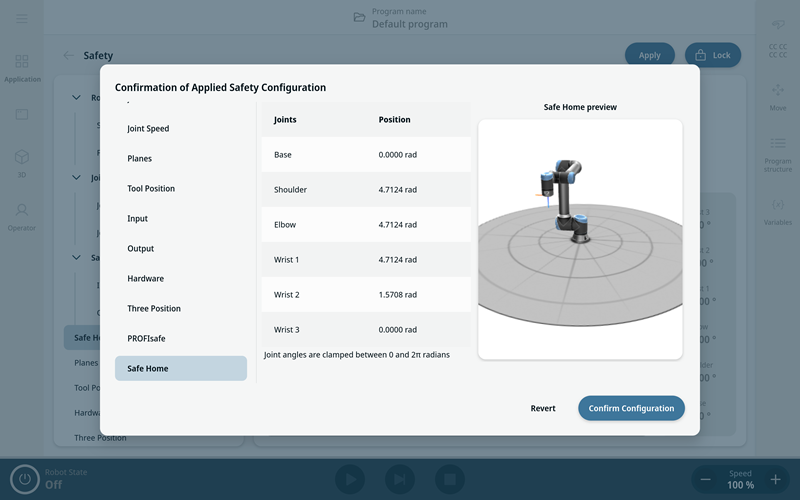
安全ホーム
ロボットが設定された 安全ホーム位置に到達した際に有効化される、安全認証(Safety-rated)出力をユーザーが定義できます。
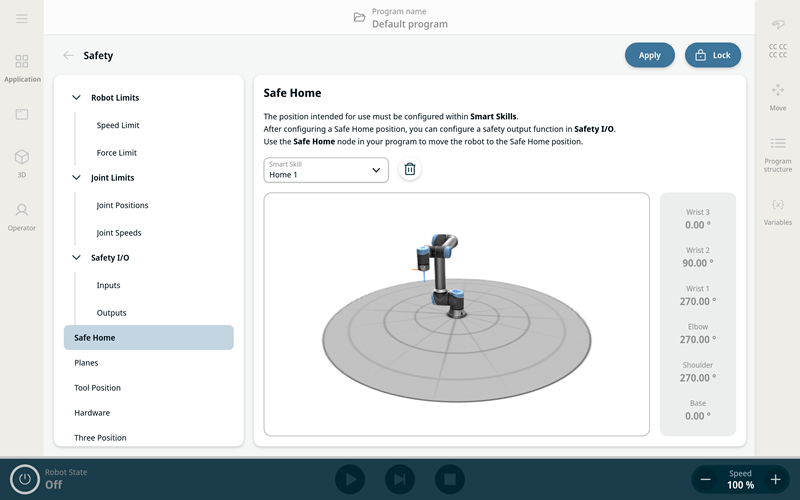
Safety(安全) > Safe Home(安全ホーム) パネルでは、利用可能な スマートスキルの位置 がドロップダウンで表示されます。これらは、安全ホーム スマートスキルで定義された位置、またはそのスマートスキルをユーザーがコピーして作成した位置です。その中から 1 つを選択し、安全設定内の 安全ホーム位置として割り当てることができます。
スマートスキルの位置をドロップダウンから選択すると、3D ビューにはその位置で定義されたロボットの静的な姿勢が表示されます。
ゴミ箱アイコンをクリックすると、安全ホームの参照を解除できます。
この操作によって スマートスキルの位置自体が削除されることはありません。
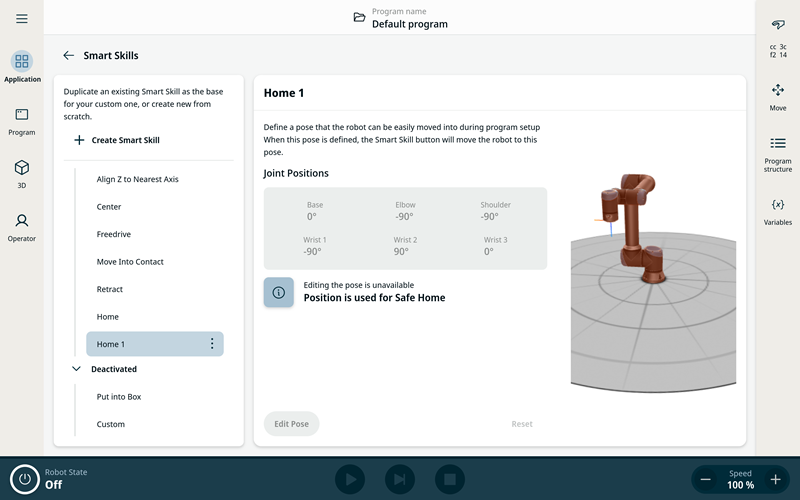
スマートスキルの位置が Safety(安全)> Safe Home(安全ホーム) で 安全ホーム位置として割り当てられている場合、以下のルールが適用されます。
-
該当する スマートスキル位置のページに、固定のメッセージボックスが表示されます。
-
その位置に対応する スマートスキルは、削除および名称変更ができなくなります。
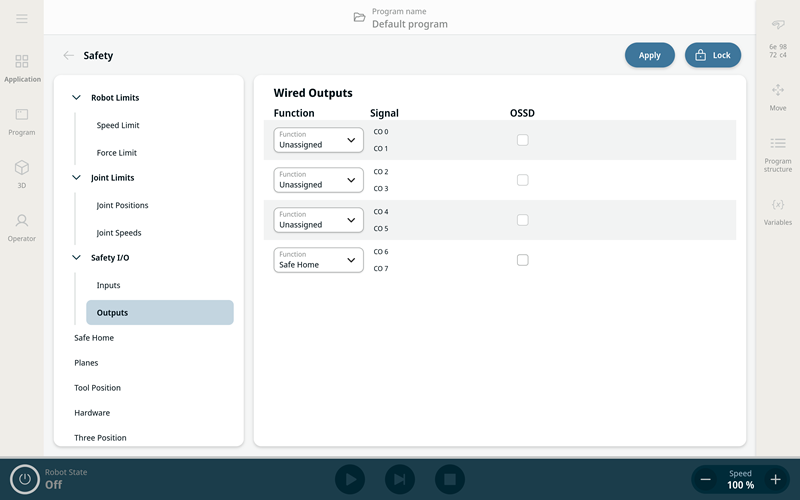
[安全設定 > 安全ホーム] に位置が割り当てられている場合、[安全I/O > 出力] の機能割り当てのドロップダウンに、新しい機能として 「安全ホーム」 が表示されます。
また、安全概要ダイアログ の 機能割り当て一覧(Function Assignment テーブル) においても、安全ホーム を確認することができます。
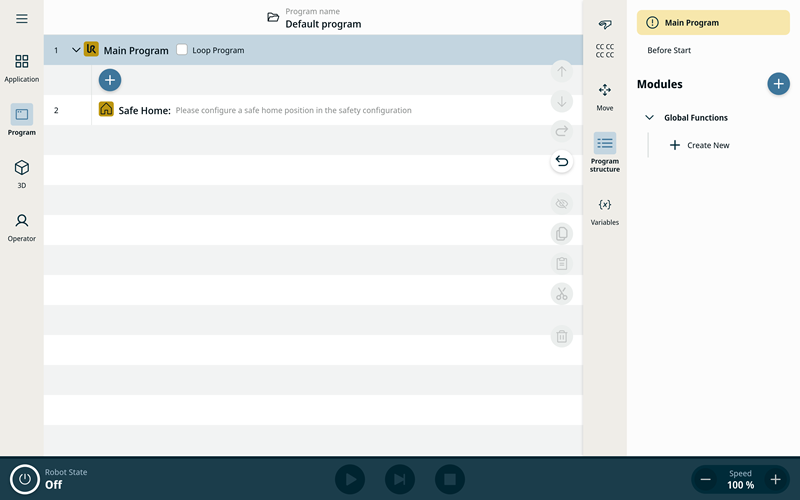
プログラムノードとしての安全ホーム
「移動(Move)」カテゴリに、「安全ホーム」 という新しいプログラムノードが追加されました。
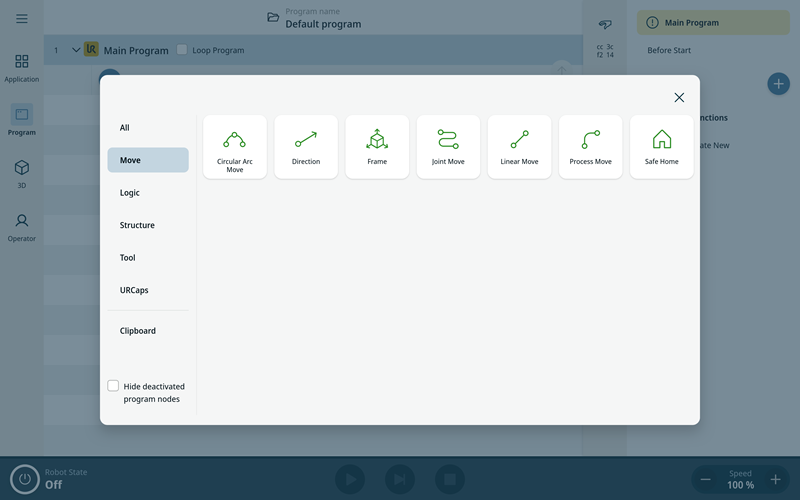
このノードには、他の移動ノードと同様にモーションプロファイルの設定オプションがあります。なお、安全ホーム位置への移動は常にジョイント移動となります。
安全設定で安全ホーム位置が設定されていない状態でこのノードを追加すると、ノードは未完了(黄色表示)としてマークされます。
PROFIsafe
 注意事項
注意事項
PROFIsafe はライセンス制のソフトウェア機能として提供されます。
本機能を使用するには、正規代理店からライセンスを購入し、PolyScope X のライセンスマネージャーで有効化する必要があります。有効化後に機能が利用可能となります。
アプリケーション/ソリューション開発やデモ目的向け(※量産用途や再配布目的では不可)の期間限定トライアルライセンスについては、UR グローバルサポートへお問い合わせください。
本ソフトウェアリリースでは、フェイルセーフ通信インターフェースである PROFIsafe が PolyScope X に導入されました。
PROFIsafe インターフェースにより、ロボットは安全PLCと停止状態、動作モード、その他の安全関連条件についてメッセージを交換することが可能になります。
|
The following fail-safe signals can be asserted or read by the Safety PLC |
|
|---|---|
|
PLC to Robot
|
Robot to PLC
|
詳細については、ユーザーマニュアルをご参照ください。
技術ガイドは、URサポートサイト(https://www.universal-robots.com/articles/ur/interface-communication/profisafe-technical-guide-for-e-series/)にてご確認いただけます。
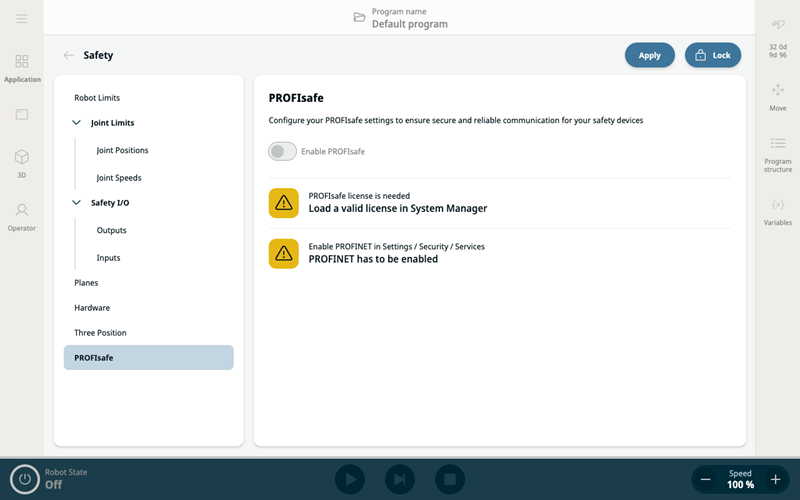
PROFIsafe 設定
アプリケーションタブ→安全設定画面に、新たに「PROFIsafe」セクションを追加しました。
これにより、安全PLCと通信するためのPROFIsafe設定を行えるようになりました。
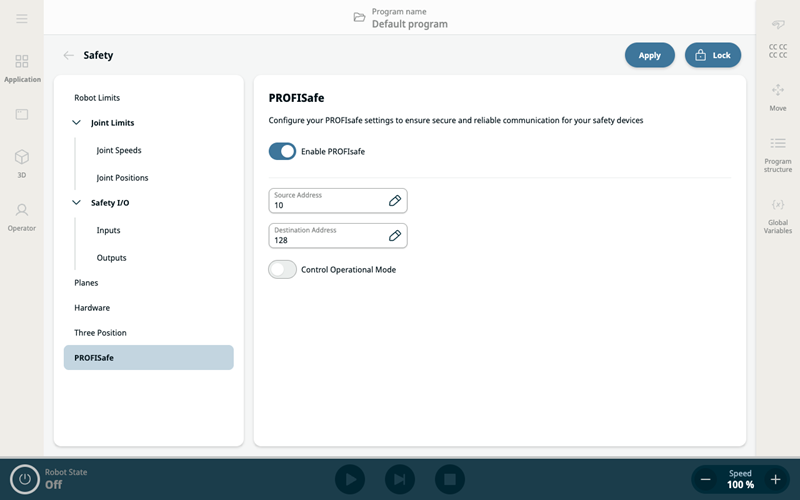
本画面では、ソースアドレスおよびデスティネーションアドレスを設定できます。これらのアドレスは、ロボットと安全PLCが相互に識別するために使用されます。
また、PROFIsafe PLCからロボットの動作モードを制御できるようにするオプションも用意されています。
なお、PROFIsafeを設定・使用するには、あらかじめ「設定」メニュー内の「セキュリティ」>「サービス」画面で「Profinet Device」オプションを有効にし、PROFINETを有効化しておく必要があります。
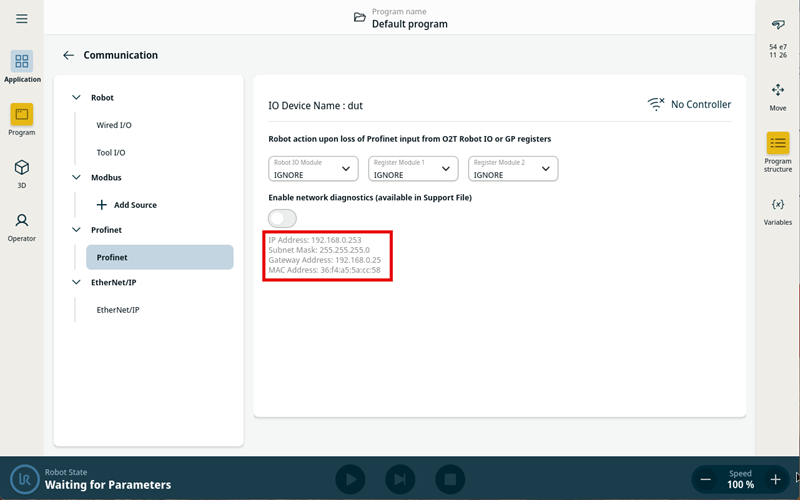
PROFINET
本バージョンでは、PROFINET仕様2.45に対する認証申請中の新しいPROFINETバージョンを導入しています。
新しいGSDMLファイルは、テクニカルサポートサイトより入手できます。
https://s3-eu-west-1.amazonaws.com/ur-support-site/163396/GSDML-V2.45-UR-PROFIsafe-20251201.xml.zip
後方互換性:
-
旧ソフトウェアバージョン向けに作成されたPLCプログラムは、変更なしで動作します(Siemens 1500および1200 PLCで検証済み)。
-
PROFINETの内部設定ファイルは、新しいPROFINETバージョンへ自動的にコピーおよび移行されます。
-
新規PLCプログラムを作成する場合は、本リリースで提供されるGSDMLファイルを使用してください。
-
ダウングレードについて
アップグレード後に行った変更は、ダウングレードするとすべて失われます。
アップグレード前に必ずデータのバックアップを取得してください。
未解決の認証課題が1件ありますが、これはEthernetポートを100 Mbit/s固定かつオートネゴシエーション無効で設定している旧型PROFINETコントローラのみに影響します。
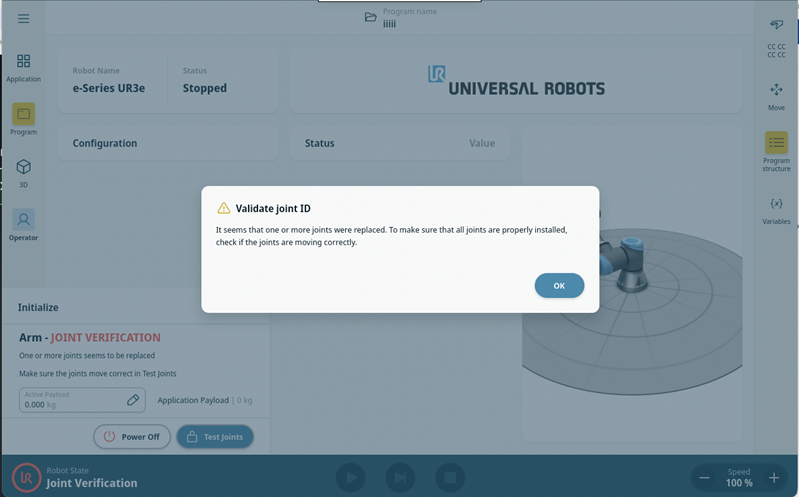
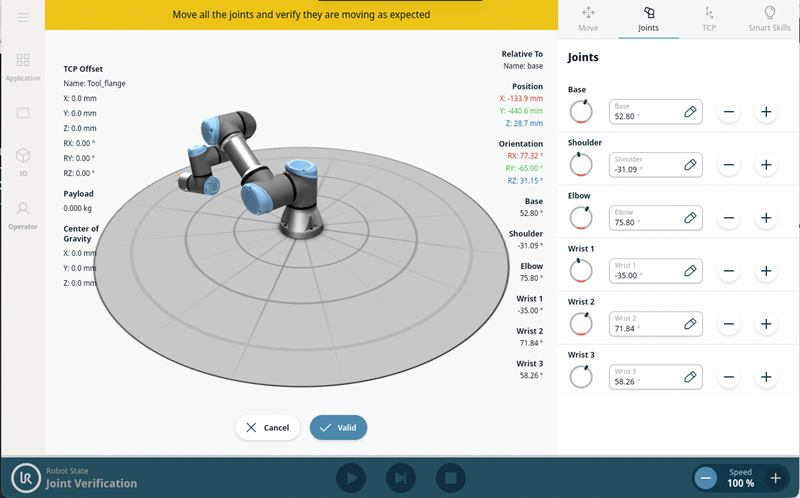
ジョイント交換後のジョイント検証手順
ロボットのいずれかのジョイントを交換した場合、コントローラでは「ジョイント検証」プロセスの実行が必要になります。本手順により、各ジョイントが正しく識別され、システム内で適切にキャリブレーションされていることを確認します。
ジョイント交換後、最初に電源を投入した際に、本プロセスが自動的に表示されます。
-
「POWER ON」を押してください。
-
-
-
ロジックプログラム(ベータ版のみ)
ロジックプログラム機能により、バックグラウンドで動作する独立したプログラムを作成できます。
このプログラムは、メインプログラムが停止した場合(意図的な停止、または非常停止などの例外による停止)でも停止しません。
アプリケーション例:
-
ロボットが停止モード(セーフガード停止、保護停止、非常停止、メインプログラムの一時停止・停止など)にある場合や、アームの電源投入前に外部センサ入力へ応答する
-
フィールドバス通信(Modbus、Ethernet/IP、PROFINET、ソケット通信、XmlRPC)を維持する
-
オペレータがセーフガードエリアへ進入している間も、セル全体のロジック動作を継続する
-
接続された表示灯でロボット状態を表示し、生産管理システム(生産PLC、SCADA)へ能動的に状態を報告する
-
小規模なロボットセルにおいてPLCを完全に置き換える
-
メインプログラムが停止または一時停止した際に、外部設備(溶接機、コンベア、ディスペンサなど)を制御停止し、継続的に監視する
-
カスタムI/O動作を構築する(フィールドバス接続のリモートI/O拡張ユニットを使用した構成も可能)
注意:本機能は、個別提供のオンデマンド型ベータリリースとしてのみ利用可能です。
URCapsからツール設定を制御可能に
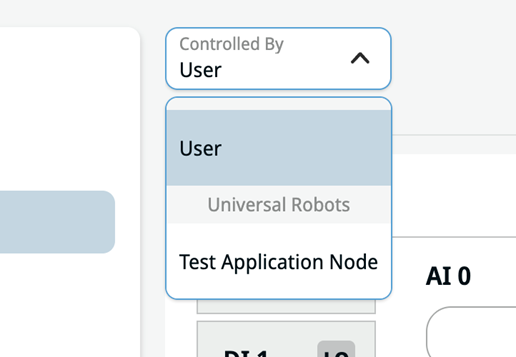
「アプリケーション」→「通信」→「ツールI/O」画面に、新たにドロップダウンメニューを追加しました。
これにより、ツール設定を制御できるURCapを選択できるようになりました。
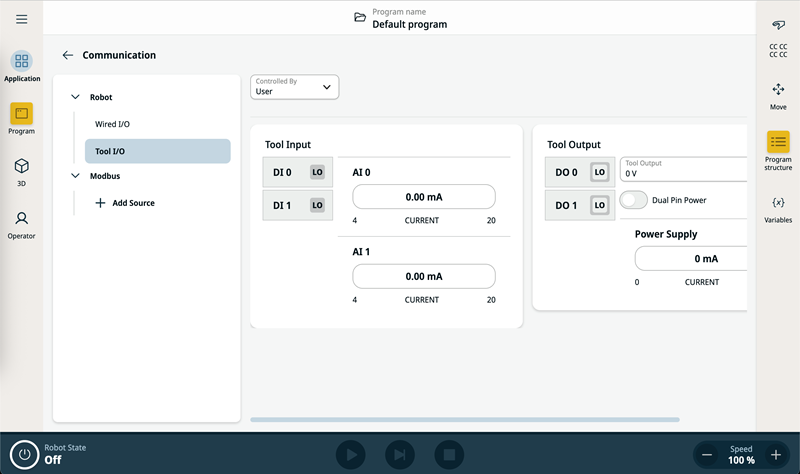
選択されたURCapは、以下の設定を管理します。
-
ツール出力電圧:0V/12V/24Vの設定
-
デュアルピン電源:有効/無効の設定
-
アナログ入力のドメイン:各アナログ入力ごとに電流/電圧を設定(各項目を押した際に表示されるポップオーバーで確認可能)
-
デジタル出力の電源方式:Sinking/Sourcing/Push-Pullの設定(各項目を押した際に表示されるポップオーバーで確認可能)
-
ツール通信設定:有効/無効、ボーレート、パリティ、ストップビット、RXアイドル文字数、TXアイドル文字数
※これらの設定はユーザーインターフェース上には表示されません。
URCapを選択すると、上記設定に関連するユーザーインターフェース上の操作は無効になります。
新しい設定は、ドロップダウンで選択された時点、プログラム読み込み時、およびプログラム実行時に適用されます。
API
Robot API
概要
Robot APIは、PolyScope X 10.11で初めて導入されました。詳細については、10.11のリリースノートをご参照ください。
本バージョンでは、主にRobot APIへgetter機能を追加し、インテグレータがロボットの状態およびプログラム情報を取得できるようにしました。
ドキュメントは、ロボット本体の以下のURLから常に確認できます。
http://[ROBOT-IP]/universal-robots/robot-api/docs
エンドポイント概要
プログラムドメイン
-
PUT /programs/v1
-
200 Success file uploaded successfully
-
403 Forbidden
-
404 Program not found
-
409 Program is loaded an active
-
422 Validation Error
-
500 Internal Server Error
-
Function: Update existing program from .urpx file
-
Request format: multipart/form-data
-
Response Codes
-
-
POST /programs/v1
-
200 Success
-
400 Program with this name already exists
-
403 Forbidden
-
422 Invalid .urpx file format
-
500 Internal Server Error
-
Function: Import program from .urpx file
-
Request format: multipart/form-data
-
Response Codes
-
-
GET /Programs/v1
-
200 Success
-
500 Internal Server Error
-
Function: Get list of programs on the robot
-
Response format: JSON {programs: Array[ProgramInformation], message:string}
-
Response Code:
-
-
GET /Programs/v1/{name}
-
200 Success program streamed
-
404 Program not found
-
422 Validation Error
-
500 Internal Server Error
-
Function: Download program by name (.urpx file)
-
Request format: url
-
Response Codes
-
システムドメイン
ロボットシステム関連
-
GET /system/v1/controlmode
-
Function: Gets the robots current controlmode
-
Response Format: JSON {mode: 'LOCAL' | 'REMOTE'}
-
Response Codes
-
200 Success
-
408 Request Timeout
-
500 Internal Server Error
-
-
-
GET /system/v1/operationalmode
-
Function: Retrieve the current operational mode of the robot.
-
Response Format: JSON { mode: 'MANUAL' | 'AUTOMATIC' }
-
Response Codes
-
200 Success
-
500 Internal Server Error
-
-
ロボット状態ドメイン
-
GET /robotstate/v1/safetymode
-
Function: Get the current safety mode
-
Response Format: JSON {mode: NORMAL | REDUCED | FAULT | PROTECTIVE_STOP | EMERGENCY_STOP}
-
Response Codes:
-
200 Success
-
408 Request timeout
-
500 Internal Server Error
-
-
-
GET /robotstate/v1/robotmode
-
Function: Retrieve the current robot mode.
-
Response format: JSON {mode: MODE*}
-
*Possible modes:
-
NO_CONTROLLER: Controller is not running
-
DISCONNECTED: Controller is disconnected
-
CONFIRM_SAFETY: Safety confirmation is required
-
BOOTING: Controller is booting up
-
POWER_OFF: Robot is powered off
-
POWER_ON: Robot is being powered on
-
IDLE: Robot is powered on and ready to break release
-
BACKDRIVE: Robot is in backdrive mode
-
RUNNING: Robot is powered and ready to execute a program
-
UPDATING: Robot is updating its firmware
-
-
Response Codes
-
200 Success
-
500 Internal Server Error
-
-
ApplicationBehavioursにおける新しいツール制御機能
ApplicationBehavioursに、URCapがツール制御パラメータを指定できる2つの新しいメソッドを追加しました。
toolControllers?: ToolControllers;
このメソッドにより、URCapは「ツールI/O」ページの「Controlled By」ドロップダウンに表示されるコントローラを指定できます。
本メソッドで返されるIDは一意である必要があり、変更してはいけません。
ドロップダウン内では、URCapのvendorNameごとにグループ分けされます。
toolControlInfo?: ToolControlInfo;
このメソッドにより、URCapがドロップダウンで選択された場合に、ツールI/Oの各種パラメータを指定できます。
export type ToolOutput = {
dualPinPower: boolean;
voltage: Voltage;
powerOutput: Record<string, PowerOutputEnum>;
};
export interface ToolCommunication {
enabled: boolean;
baudRate: BaudRateEnum;
parity: ParityEnum;
stopBits: StopBitsEnum;
rxIdleChars: number;
txIdleChars: number;
}
export interface ToolControl {
toolAnalogDomainMap?: Record<string, SignalAnalogDomainValueEnum>;
toolCommunication?: ToolCommunication;
toolOutput?: ToolOutput;
}
コントローラ
-
RTDE入力インターフェースの堅牢性を強化しました。
コントローラは入力データサイズをより厳密にチェックし、バッファオーバーフローを防ぐためにクライアントを切断します。レシピID、通信周波数、および文字列形式の入力値についても妥当性チェックを実施し、不正な文字や範囲外の値が含まれている場合は拒否されます。
RTDE受信側には入力レート制限を追加しました。最大10メッセージのバースト送信を許可しますが、その後は約2msの間隔を空けてメッセージを評価します。
-
特定の条件下では、ロボット停止を回避するために速度がわずかに制限される場合があります。
対象条件は以下のすべてを満たす場合です。-
安全の力制限設定が250Nを超えている
-
ベースジョイントが高速で動作している
-
同時に、エルボーまたはツールがベースジョイントの回転軸付近にある
この場合に限り、速度が自動的にわずかに低減されます。
-
ドキュメント
RTDEプロトコルおよび各データフィールドの説明を強化しました。
ロボットモードや安全状態などの列挙型フィールドについて、取り得る値の一覧を追加しています。
ドキュメントは以下より参照できます。
https://docs.universal-robots.com/tutorials/communication-protocol-tutorials/rtde-guide.html