
Controlling End-effector from Polyscope when using Toolpath Nodes in Remote TCP & Toolpath URCap (Polyscope Version < 5.11.5)
Remote TCP & Toolpath URCap is embedded in Polyscope for e-Series Robots. This article describes how to control end-effectors when executing G-code files using the toolpath nodes enabled by this URCap in Polyscope 5.6 and above.
Example is valid for: e-Series Software version: 5.6.0 to 5.11.3
Note that older or newer software versions may behave differently. Please refer to this article if your robot runs Polyscope 5.11.5 or above.
This example can be used for e-Series only. Sample files are available for download at the bottom of the page.
The Remote TCP & Toolpath URCap makes it easier to program Universal Robots for process applications, such as dispensing, deburring, polishing, sewing, welding, additive manufacturing, etc. It can automatically generate robot motion based on imported G-code toolpath files. When the end-effector is mounted onto the robot’s tool flange, a G-code file can be executed using a Toolpath_MoveP node (tutorial). When the end-effector is mounted off the robot at a fixed location relative to the robot base, Remote TCP is the right option. Under a RTCP_MoveP node, a RTCPToolpath node can be used to execute a G-code file (tutorial).
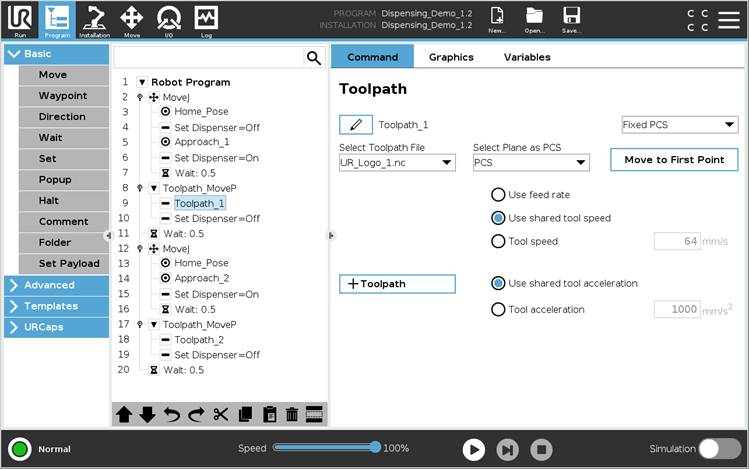
It may be desired to turn the robot’s end-effector on and off while it executes a G-code file. Let’s use this dispensing demo as an example. The robot dispenses gel on two different segments, and the dispenser is turned off while the robot moves from the end of the first segment to the beginning of the second segment. How to control the end-effector in this example?
To control the end-effector while using Toolpath_MoveP or RTCPToolpath nodes, it is recommended to use Set nodes in the program tree if your robot uses a Polyscope version between 5.6.0 and 5.11.3. Each toolpath segment requires its own G-code file, and the Set nodes are inserted in between. For the example above, two G-code files should be created for the UR logo pattern as it consists of two segments. The program tree should look like this:
The program and installation files (Dispensing_Demo_1.2.urp, Dispensing_Demo_1.2.installation) and the G-code files (UR_Logo_1.nc and UR_Logo_2.nc) are available at the bottom of the page.
Please pay attention to the following when you use this approach:
- The toolpath segments should not contain any links, a.k.a. air moves. Otherwise, the dispenser will be turned on before the robot reaches the initial point of a toolpath segment or not turned off after the robot moves away from the last point. Links can be managed in the CAD/CAM software that you use to generate the G-code files.
- The robot must move to the initial point of each segment using a Move node before it turns on the dispenser using a Set node. In the example above, Approach_1 is the waypoint that matches the initial point of Toolpath_1, and Approach_2 is the waypoint that matches the initial point of Toolpath_2.
- Wait nodes must be used outside Toolpath_MoveP
If you are going to try these programs on your robot, please make sure to adjust the TCP, Part Coordinate System (PCS) and waypoints based on your hardware setup. The program structure and G-code files should not require any modification.
Should you have any questions, please feel free to post them on our user forum or contact Technical Support using the Request Information from UR+ Partner button on the UR+ product page.