
Tabletop Demo of Regular TCP Toolpath Moves - UR logo
Remote TCP & Toolpath is a URCap in Polyscope 5.6 for e-Series robots. This article describes how to set up a tabletop demo with a UR3e robot to showcase Regular TCP Toolpath Moves enabled by this URCap.
Example is valid for: e-Series Software version: 5.6.0.90886
Note that older or newer software versions may behave differently.
This example can be used for e-Series only. Program files are available for download at the bottom of the page.
We are going to set up a mock-up dispensing demo shown in this video.
Please prepare the following items for this demo
- A UR3e robot securely mounted on a table
- A dispensing head from Fancort Industries (certified UR+ Partner)
- Or any other pointed end-effector that fits on a UR3e robot
- A UR logo pattern printed on a Letter size paper
- UR_Logo.PDF attached below
- A G-code toolpath file corresponding to the UR logo pattern
- UR_Logo.nc attached below
- Program and Installation files
- Program: Tabletop_Demo.urp
- Installation: Tabletop_demo.installation
Please learn how to do the following before moving on. Refer to the Polyscope user manual for detailed instructions
- Import Program and Installation files
- Configure a TCP
- Create and edit a Plane feature
- Set a MoveJ waypoint
Setup Procedure
1. Mount the UR3e robot to a table securely.
- Upgrade to Polyscope 5.6 or above. Please download the installer from this page: https://www.universal-robots.com/download/?option=41809#section41493
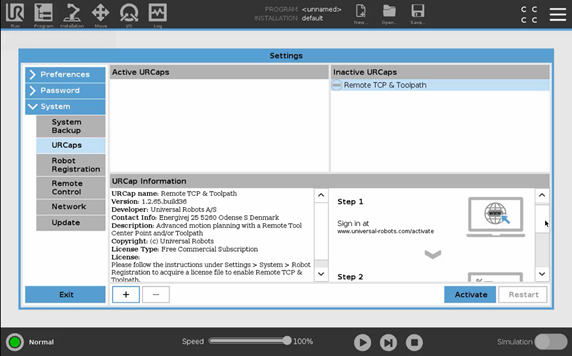
- Follow the instructions to register the robot to activate the embedded Remote TCP & Toolpath URCap. (Hamburger Menu -> Settings -> System -> URCaps)
- Step 1. Sign in at universal-robots.com/activate
- Step 2. Download the registration file to your USB drive
- Step 3. Plug your USB drive into the teach pendant and tap Activate to load the registration file
- Leave enough space for a Letter size paper next to the robot.
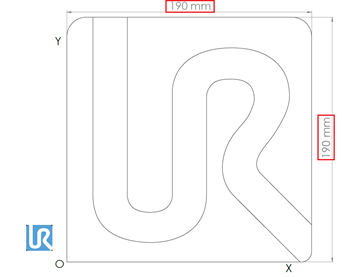
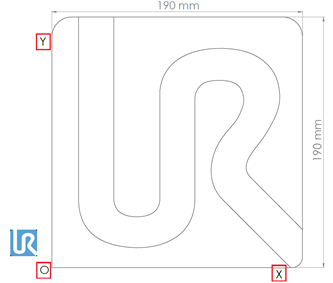
2. Print out the UR logo on a Letter size paper to its actual size.
- Double check the major dimensions of the printed pattern match the marks.
3. Tape the UR logo sheet next to the robot base.
- Make sure the whole sheet is within the reach of the robot.
- In the video above, the origin of the UR logo pattern is located at (-242.9, 86.7, -11.7) in the robot base frame.
4. Download the attached Program and Installation files to your USB drive and import them into Polyscope. Open the Program file.
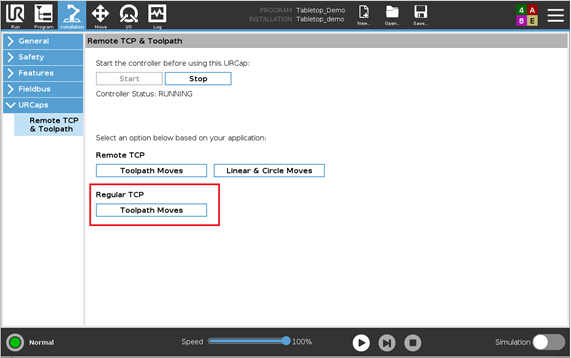
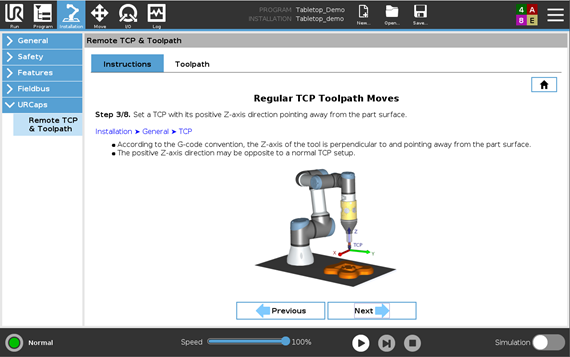
5. Select Regular TCP Toolpath Moves in the Remote TCP & Toolpath URCap and go through the embedded instructions to understand the workflow.
6. Attach the Fancort dispensing head or your own pointed end-effector to the robot tool flange.
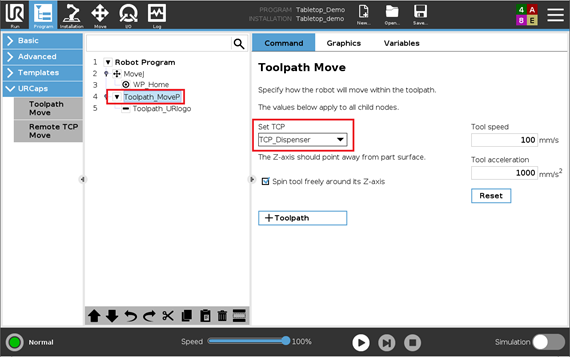
7. Reconfigure the TCP named TCP_Dispenser using the wizard in Polyscope.
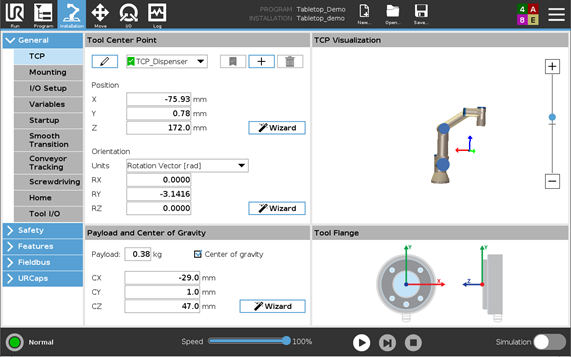
- Follow Step 3/8 in the embedded instructions. Make sure the Z-axis of the tool is perpendicular to and pointing away from the part surface. In our example, the Z-axis of the tool is pointing directly into the tool flange, so we set Ry to be -180 degrees (-3.1415 rad).
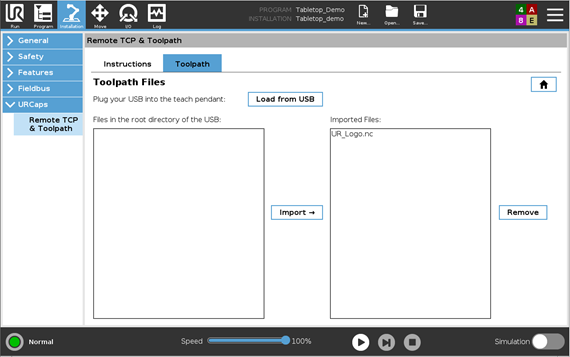
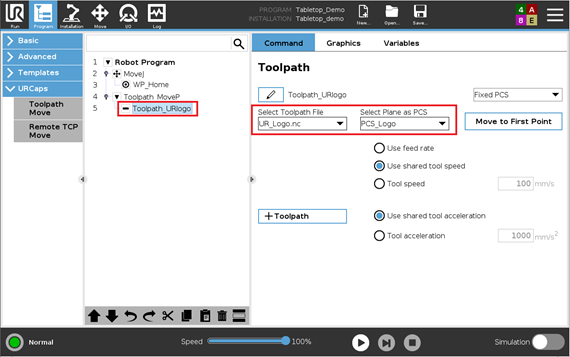
8. Download the G-code toolpath file named UR_Logo.nc to the root directory of your USB drive and import it into Polyscope.
9. Retrain the Plane feature named PCS_Logo.
- Follow Step 4/8 in the embedded instructions.
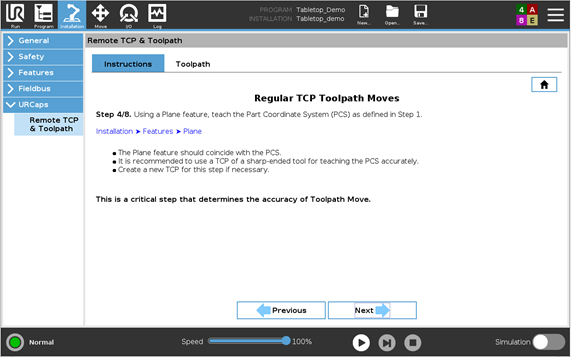
- The origin of the PCS is located at the bottom left corner of the UR logo. The X- and Y-axes are along the two edges.
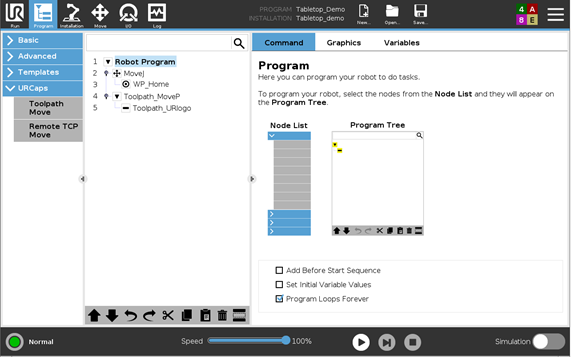
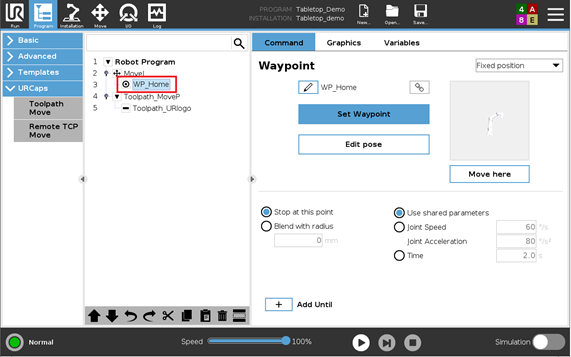
10. Go to Program. Set WP_Home to be somewhere above the UR logo sheet.
11. Make sure the correct TCP, PCS, and Toolpath file are selected.
12. Run the program at a low speed to verify the motion is expected.
To learn how to create this demo from scratch, please watch this step-by-step tutorial video.