
Remote TCP & Toolpath URCap: Post-processor Configuration using Autodesk Fusion 360 on e-Series
This article explains how to load this post-processor in extermal Post-processor Software Autodesk Fusion 360
Example is valid for: Autodesk Fusion 360 Post-processor for Universal Robots e-Series, Version 1.0
Note that older or newer software versions may behave differently.
This example can be used for e-Series only. Sample files are available for download at the bottom of the page.
Remote TCP & Toolpath URCap FAQ.
Autodesk Fusion 360 is a commercial CAD/CAM software package that can be used to generate toolpath files in G-code. Universal Robots’ Polyscope software contains the Remote TCP & Toolpath URCap, which automatically generates robot motion based on imported G-code files.
The purpose of this post-processor is to ensure the output from Autodesk Fusion 360 uses the correct syntax that is compatible with the Remote TCP & Toolpath URCap. This post-processor supports toolpaths up to 5-axis.
Please download the files:
- Post-processor configuration: UniversalRobots.cps (UR+ Page, Files Tab)
- Part model: UR_Logo.f3d (attached to the end of this article)
- Sample G-code toolpath files: Toolpath_1.nc, Toolpath_2.nc (attached to the end of this article)
Please meet the following requirements to use the post-processor properly.
- Universal Robots e-Series: UR3e/UR5e/UR10e/UR16e
- Polyscope: 5.6 or higher
- Autodesk Fusion 360: 2.0.8176 or higher (Official Website)
Note: Hidden files and folders must be enabled on your computer to work through the instructions.
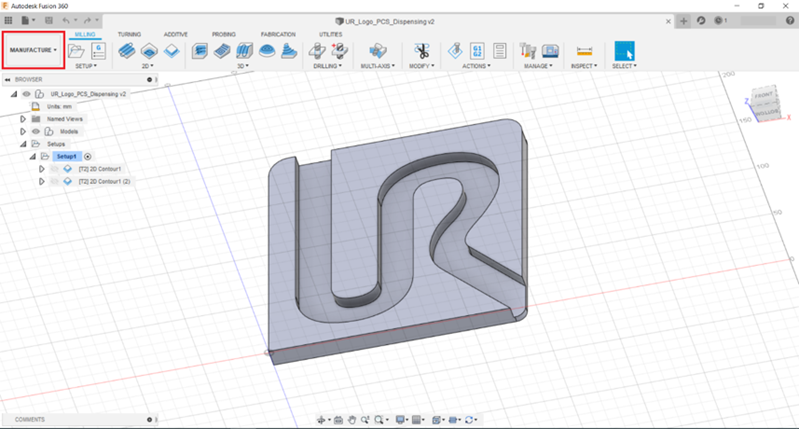
Open the part model in Autodesk Fusion 360 and switch to the Manufacturing Workspace.
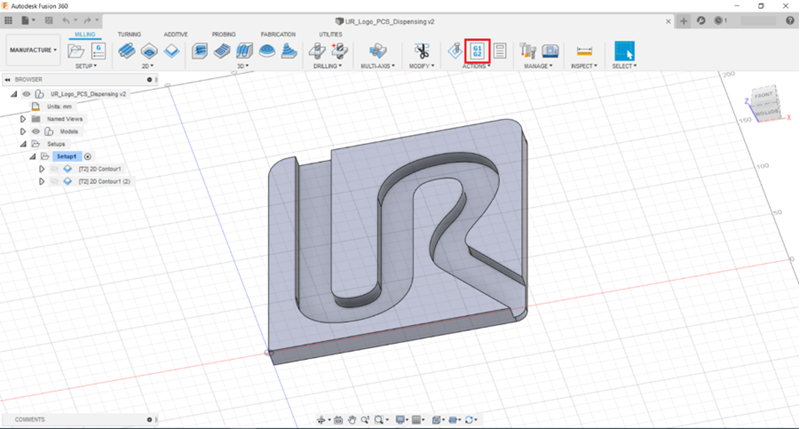
Click the Post Process button on the Ribbon.
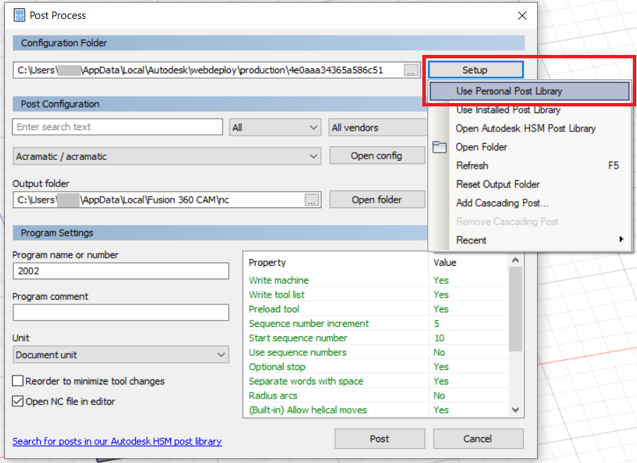
Click the “Setup” button and then select “Use Personal Post Library” from the drop-down menu.
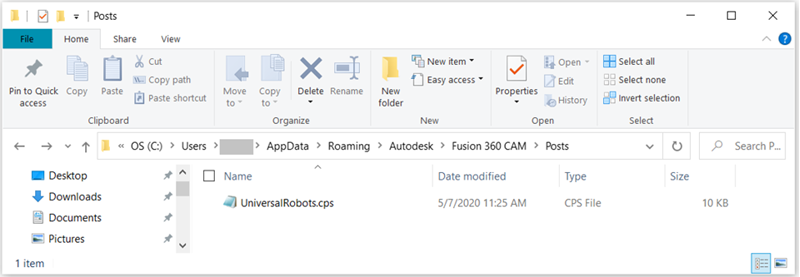
Click the “Setup” button again and select “Open Folder” from the drop-down menu. This will open the “Posts” folder in Windows Explorer.
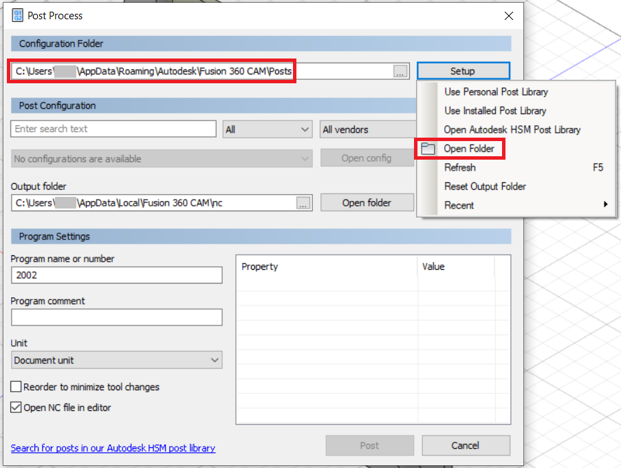
Copy and paste the downloaded post-processor into the “Posts” folder.
Click the “…” button next to the “Setup” button. Click the “Select Folder” button in the pop-up window.
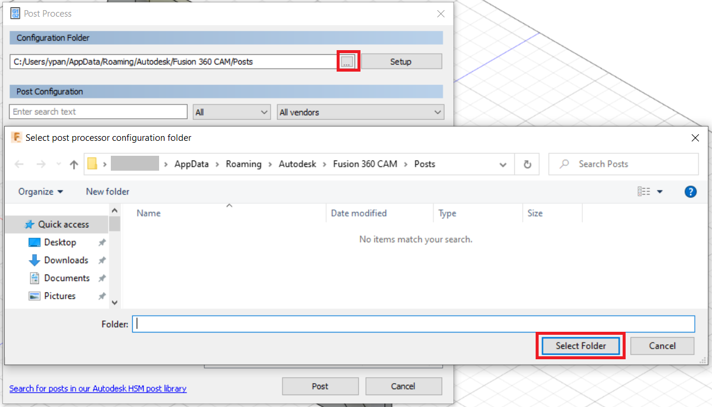
The post-processor in the “Posts” folder should be recognized automatically.
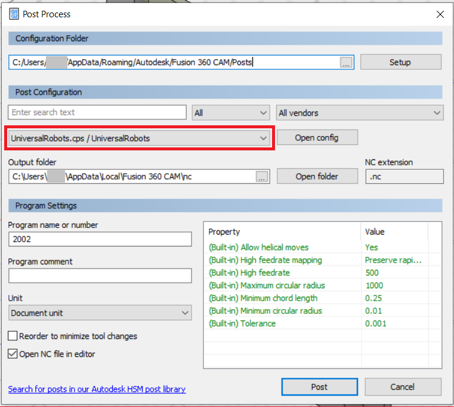
Now you are ready to use this post-processor to generate G-code toolpath files that are compatible with the Remote TCP & Toolpath URCap in Polyscope.
Toolpath_1.nc and Toolpath_2.nc are the G-code files generated using this part model.
To learn more about how to load G-code files in Polyscope, please check out this support article.