
Universal Robots Toolpath Generator for SOLIDWORKS
This article explains how to install the Universal Robots Toolpath Generator for SOLIDWORKS and use it to generate 2.5-axis G-code toolpaths that are compatible with the Remote TCP & Toolpath URCap.
Created date: June 5th, 2020
Example is valid for: Universal Robots Toolpath Generator for SOLIDWORKS, Version 1.0
Note that older or newer software versions may behave differently.
This example can be used for e-Series only. Sample files are available for download at the bottom of the page.
SOLIDWORKS® is a commercial CAD software package for designing industrial components. The 3D models developed in SOLIDWORKS serve as a basis for G-code toolpath generation. Universal Robots’ Polyscope software contains the Remote TCP & Toolpath URCap, which automatically generates robot motion based on imported G-code files.
The purpose of this Toolpath Generator is to provide an easy-to-use approach for defining 2.5-axis toolpaths in SOLIDWORKS. It also ensures the output from SOLIDWORKS uses the correct syntax that is compatible with the Remote TCP & Toolpath URCap.
Universal Robots is a Certified Solution Partner of SOLIDWORKS.

Please download the files attached to the end of this article:
- Installer: UR+ Page, Files Tab
- Part model: UR_Logo.SLDPRT
- Sample G-code toolpath files: UR_Logo_Segment_1.nc, UR_Logo_Segment_2.nc
Please meet the following requirements to use the Toolpath Generator properly:
- Universal Robots e-Series: UR3e/UR5e/UR10e/UR16e
- Polyscope: 5.6 or higher
- SOLIDWORKS: 2019 or higher (Official Website)
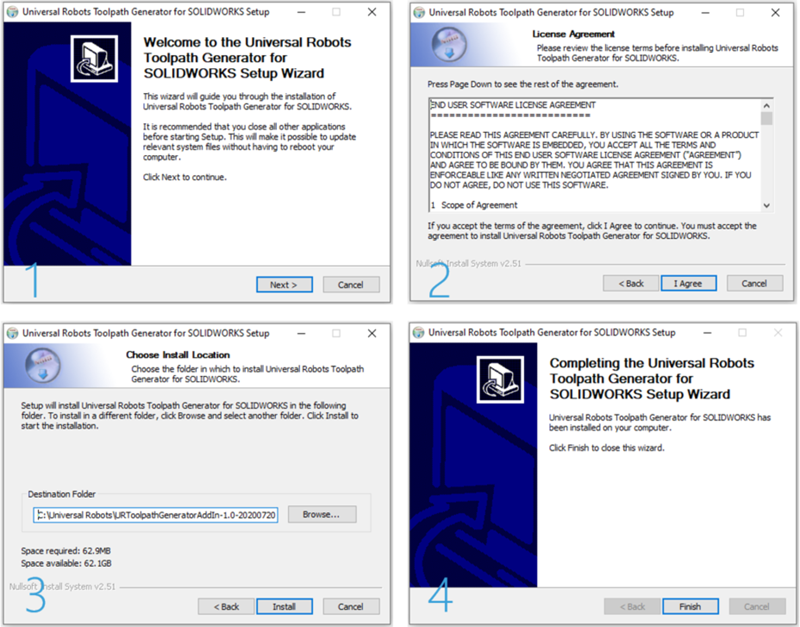
Double click the installer (.exe file) on your computer to start the installation process.
Follow the wizard to complete the installation.
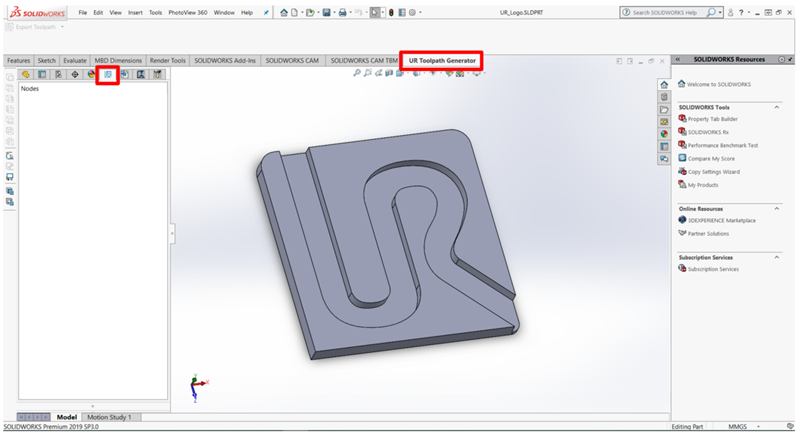
Open the part model file in SOLIDWORKS.
![]()
Go to Options > Add-ins, make sure the Toolpath Generator is active.
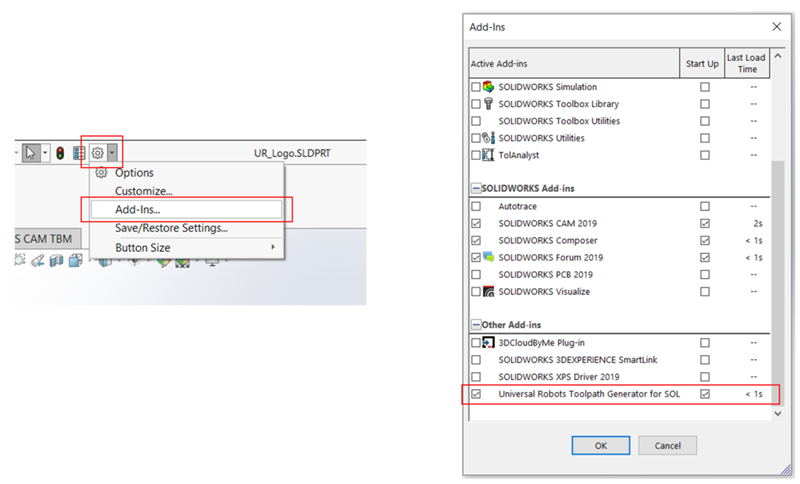
The Toolpath Generator should create two new tabs.
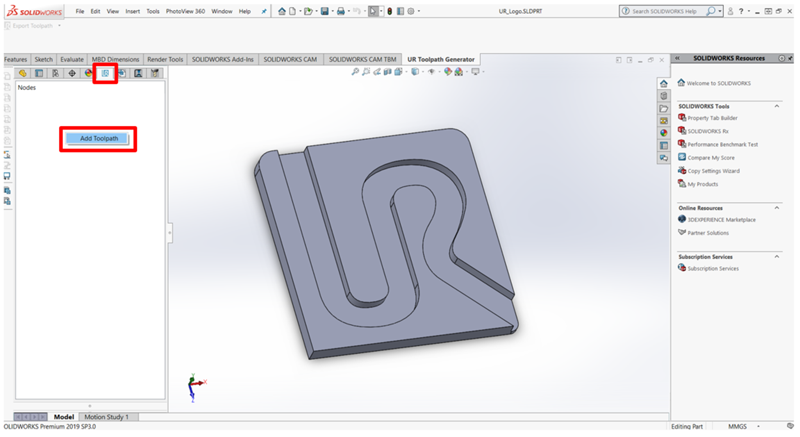
To create a new toolpath, go to the Toolpath Tree tab and right click in the white space. Select Add Toolpath.
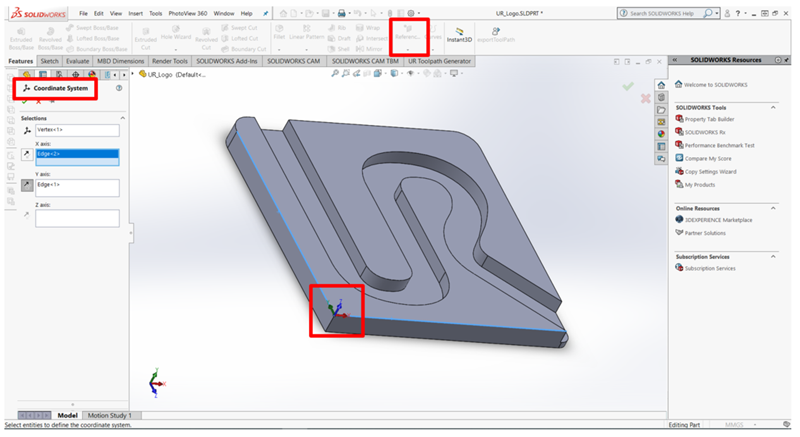
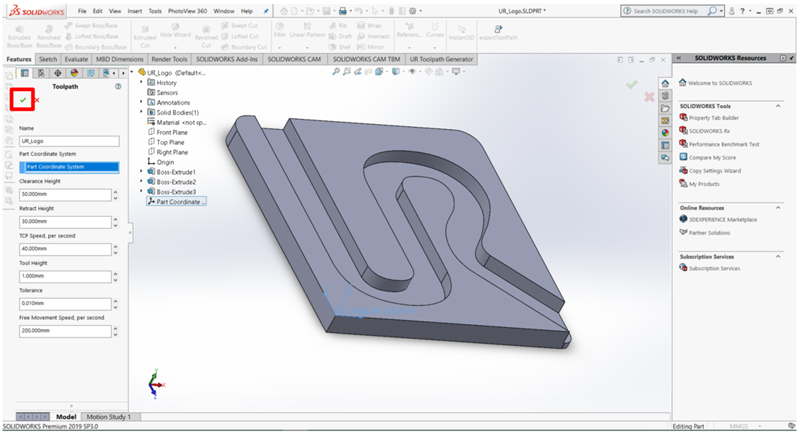
Create a Part Coordinate System using the Coordinate System tool in SOLIDWORKS.
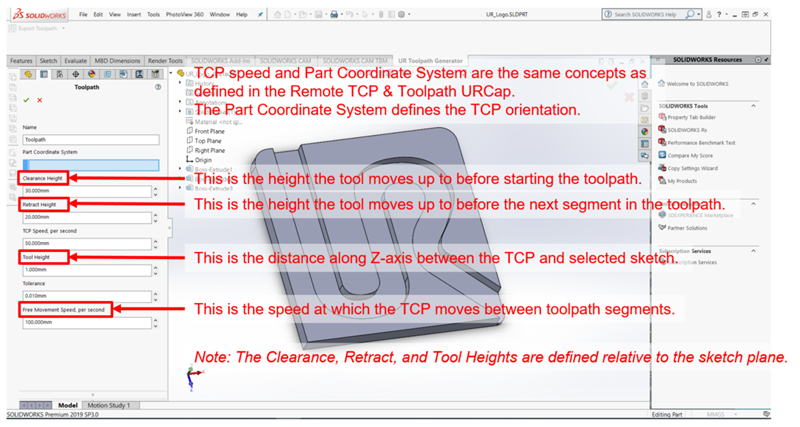
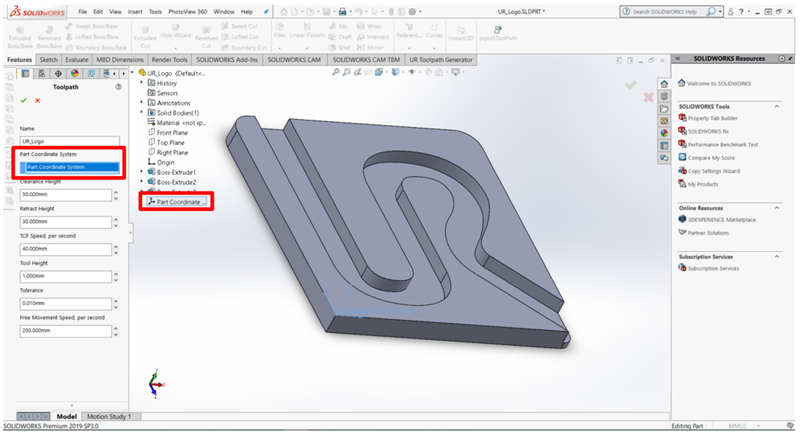
Switch to the Toolpath Configuration page. Select the Part Coordinate System created in the previous step.
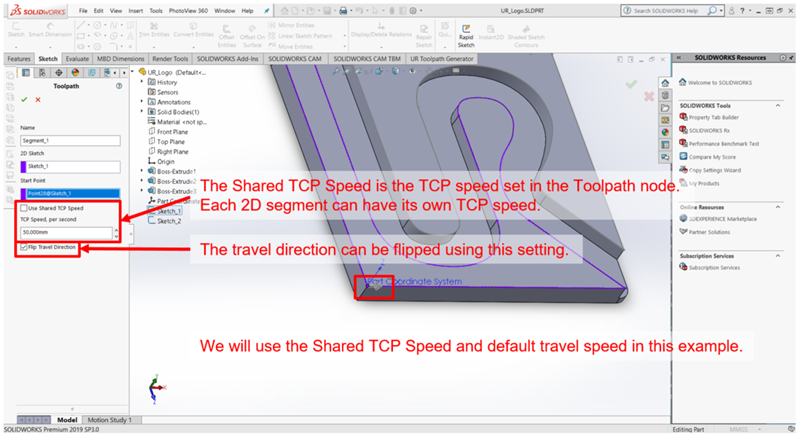
Change other settings if desired. Once complete, click the green checkmark button to finish the toolpath configuration.
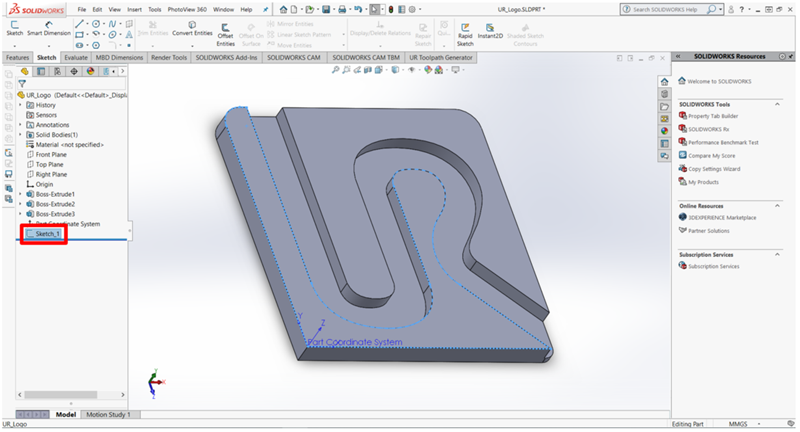
A sketch defines a toolpath trajectory. Use the Sketch tool in SOLIDWORKS to create the first sketch as follows.
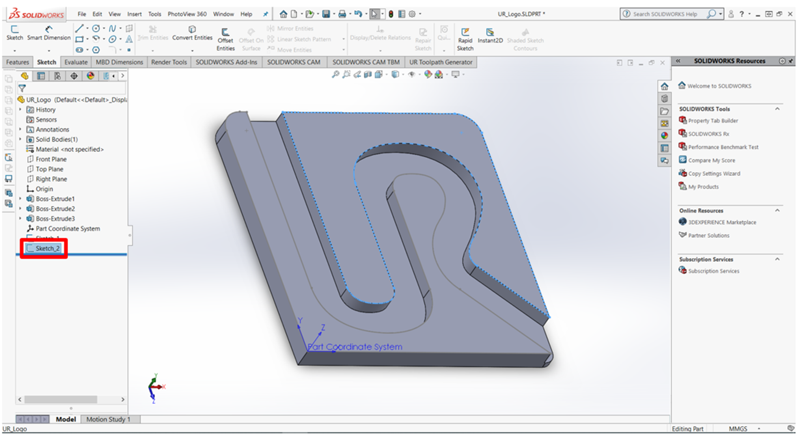
Create the second sketch as follows.
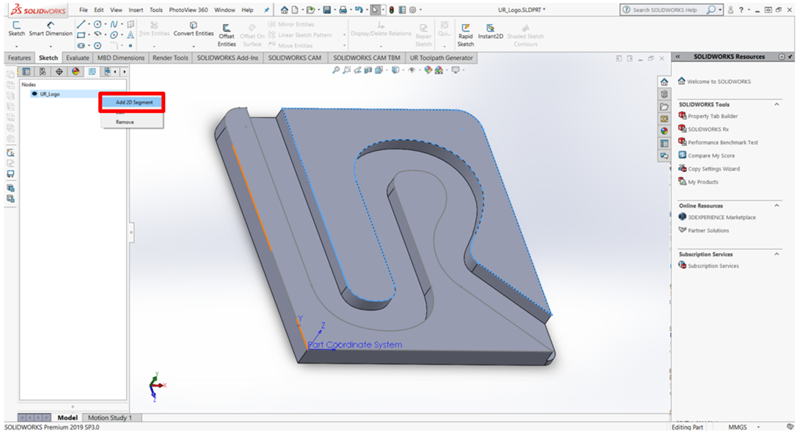
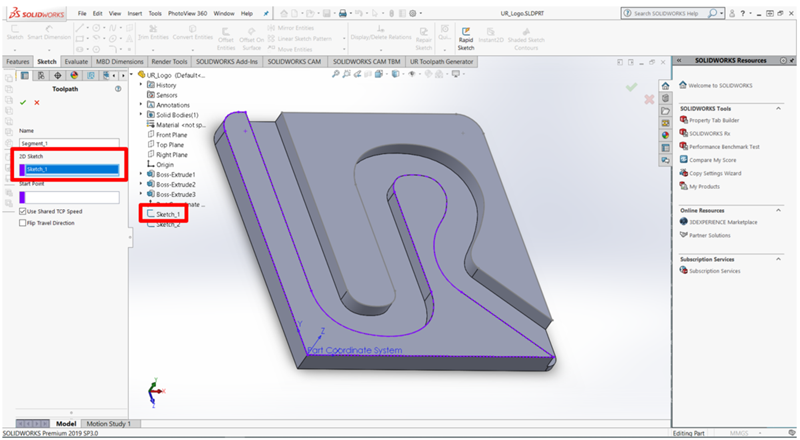
Switch to the Toolpath Tree tab. Right click the Toolpath node. Select Add 2D Segment.
Under 2D Sketch, select Sketch_1.
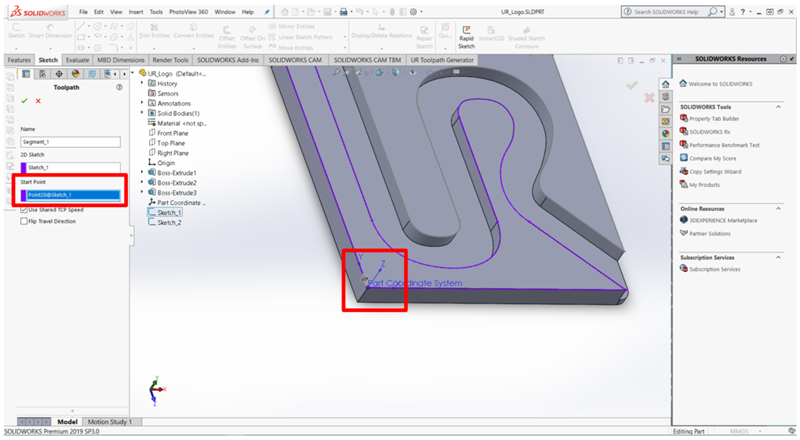
Set the Start Point as follows.
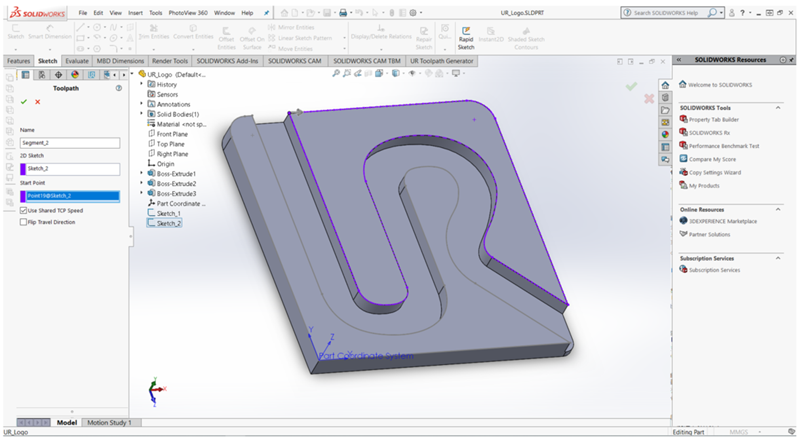
Follow the same steps to select Sketch_2 and configure its settings.
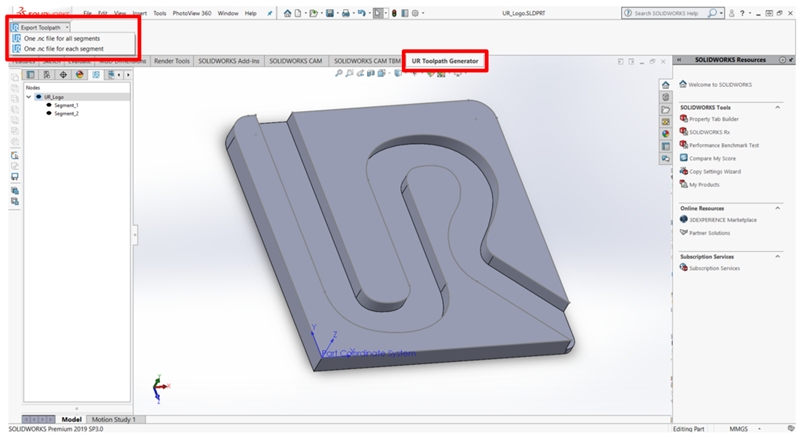
Go to UR Toolpath Generator tab and click Export Toolpath. There are two options.
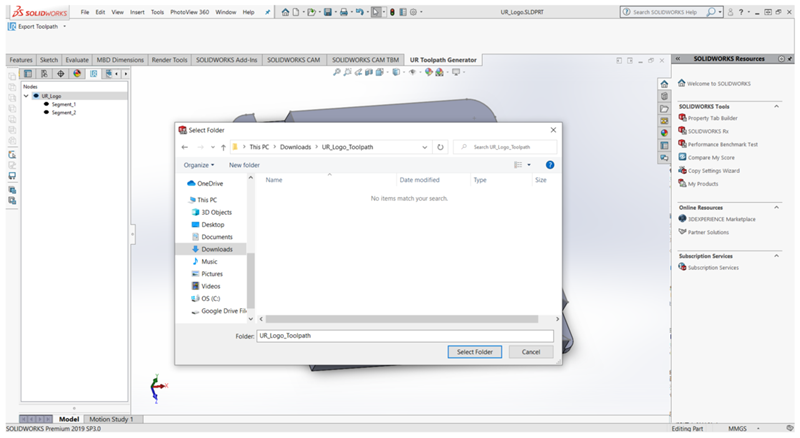
Select a folder where the toolpath files should be saved.
If the export is successful, the following message will be displayed.
Go to the folder where the toolpath files were saved.
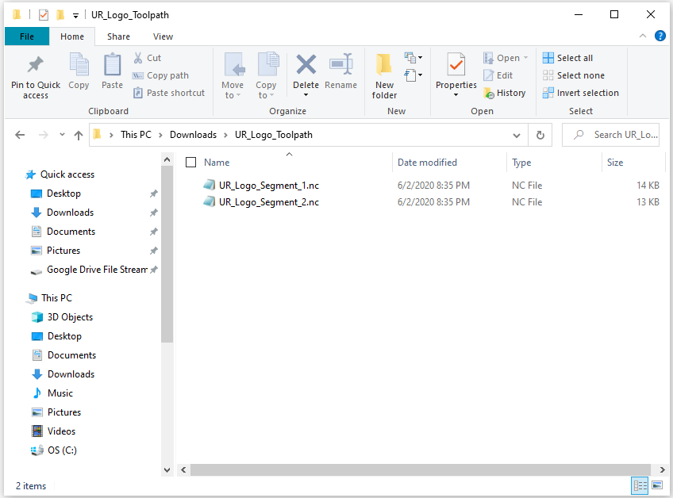
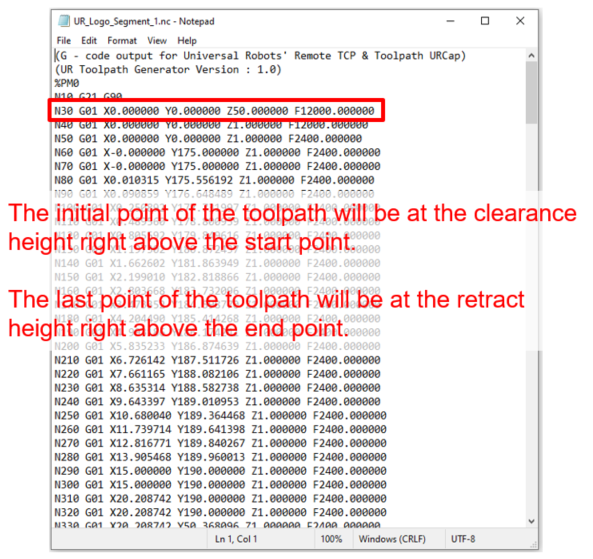
UR_Logo_Segment_1.nc and UR_Logo_Segment_2.nc attached below are the G-code files generated using this part model.
Now you are ready to import these toolpath files into Polyscope and use them in the Remote TCP & Toolpath URCap.
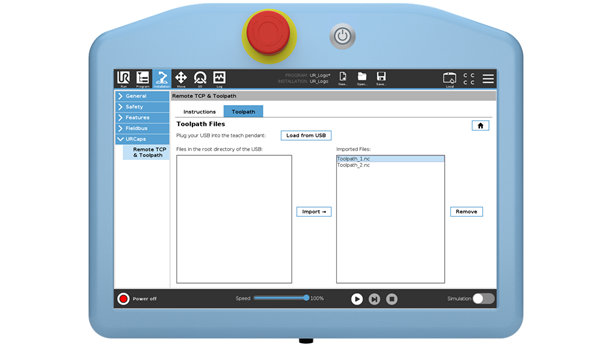
To learn more about how to load G-code files in Polyscope, please check out this support article.
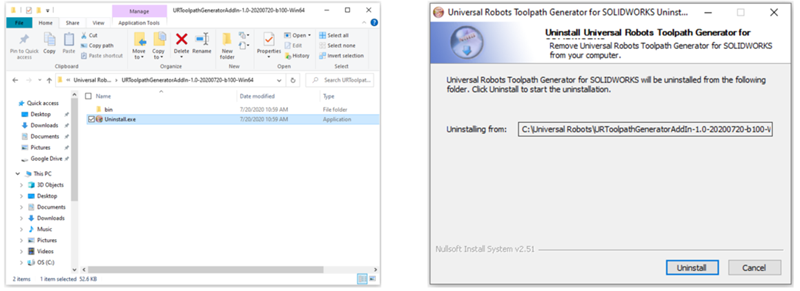
If you would like to uninstall the Toolpath Generator from your computer, please go to the folder in which you installed it.
Double click Uninstall.exe to activate the wizard. Please follow the steps to uninstall the Toolpath Generator.
Note: Please uninstall the old version before installing a new version.