| Ako použiť šablónu IMMI
|
- V PolyScope ťuknite v hlavičke na položku Program a potom vyberte možnosť IMMI.
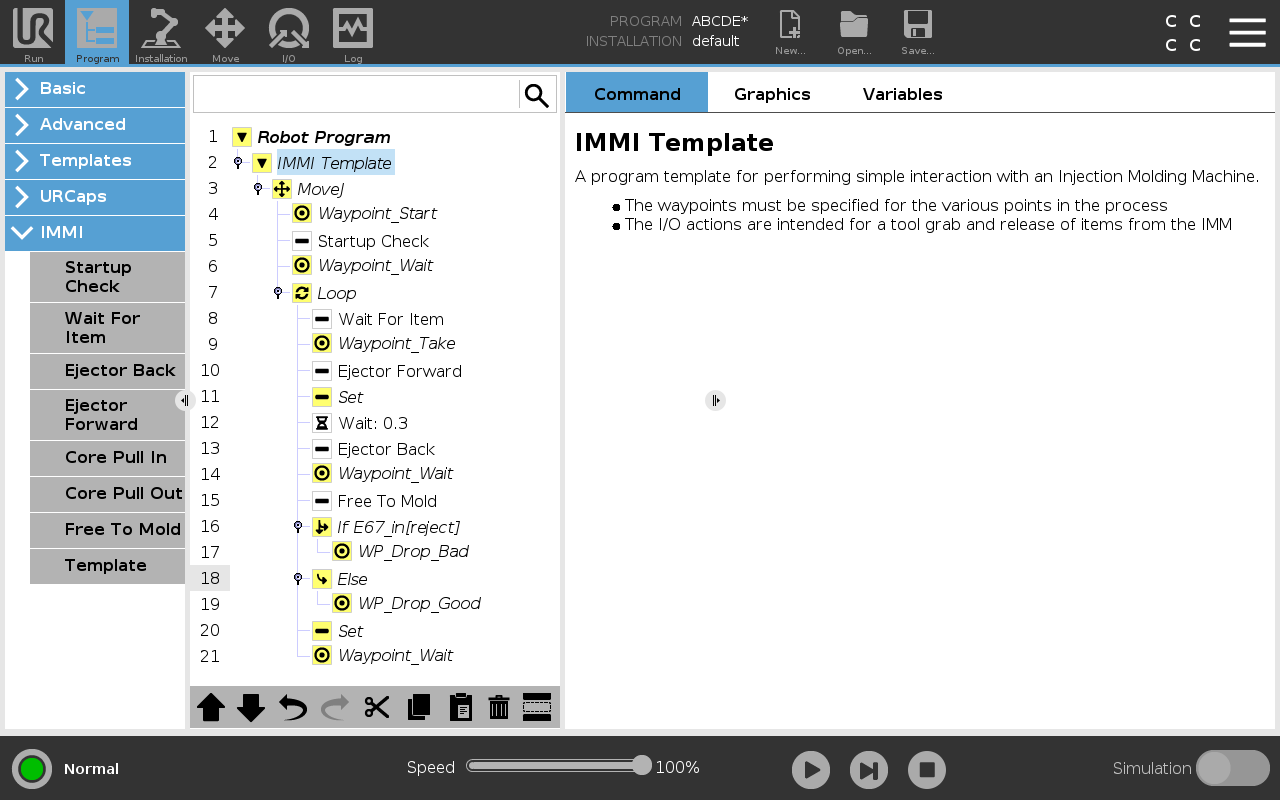
- Select Template for the program screen to appear with the template
loaded. Štruktúra šablóny je viditeľná na ľavej strane obrazovky, ako je znázornené nižšie.
- Pripravte robota na manipuláciu s predmetmi výberom požadovaných traťových bodov z nasledujúcich:
- Waypoint_Start: Štartovací bod robotického ramena pred spustením procesu injekčného vstrekovania.
- Waypoint_Wait: Bod čakania robotického ramena.
- Waypoint_Take: Bod, v ktorom robotické rameno odoberá položku z IMM.
- WP_Drop_Bad: Bod, v ktorom robotické rameno uvoľnilo odmietnutú položku.
- WP_Drop_Good: Bod, v ktorom robotické rameno uvoľnilo akceptovanú položku.
- Vyberte a prispôsobte jeden z nasledujúcich uzlov na ovládanie zveráku:
- Nastaviť: Určite, kedy nástroj uchopí a uvoľní predmet.
- Slučka: Robota spustite len vtedy, keď je potrebné odstrániť položku z VL.
- MoveJ: Upravte rýchlosť pohybu robota tak, aby zodpovedala dobe cyklu VL.
- V možnosti Pohybový uzol upravte rýchlosť kĺbu a zrýchlenie kĺbu, tak aby bola braná do úvahy krehkosť predmetu.
|