| Pentru a folosi un șablon pentru IMMI
|
- Din PolyScope, în antet, apăsați Program și selectați IMMI.
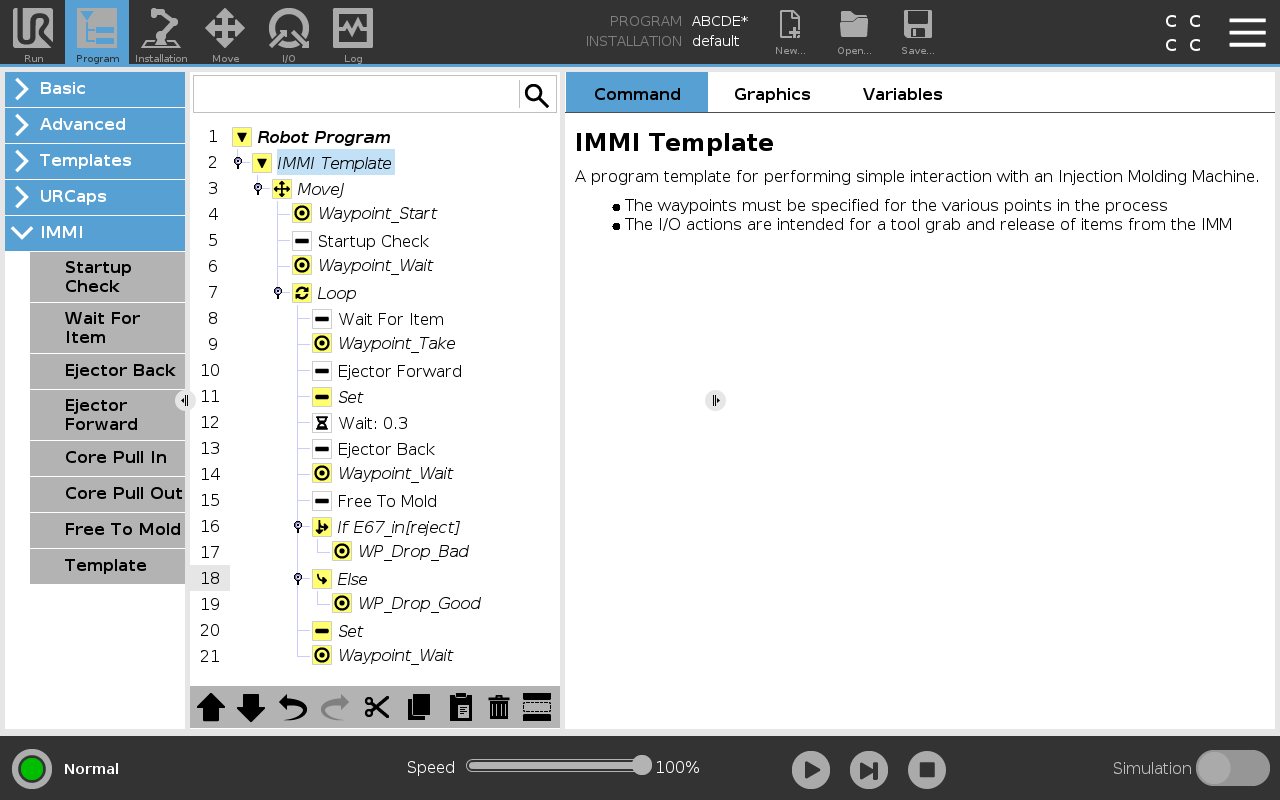
- Select Template for the program screen to appear with the template
loaded. Structura șablonului va fi apoi vizibilă în partea stângă a ecranului, după cum este ilustrat mai jos.
- Pentru a pregăti robotul pentru manipularea obiectelor, selectați punctele de trecere dorite din următoarele:
- Waypoint_Start: Punctul de pornire al brațului robotului înainte de începerea procesului de turnare prin injecție.
- Waypoint_Wait: Punctul de așteptare al brațului robotului.
- Waypoint_Take: Brațul robotului scoate piesa din punctul pentru IMM.
- WP_Drop_Bad: Punctul în care brațul robotului eliberează rebutul.
- WP_Drop_Good: Punctul în care brațul robotului eliberează piesa bună.
- Selectați și personalizați unul dintre următoarele noduri pentru a comanda dispozitivul de prindere:
- Setare: Determină când scula apucă și eliberează o piesă.
- Loop: Robotul pornește numai când trebuie scoasă o piesă din IMM.
- MoveJ: Reglează viteza de mișcare a robotului pentru a se sincroniza cu timpii ciclului IMM.
- În nodul Mutare, reglați Viteza articulației și Accelerația articulației pentru a le potrivi cu fragilitatea piesei.
|