I/O pentru IMMI în nodurile de program normale
| Descriere |
Această secțiune descrie modul de utilizare a inputurilor IMMI în nodurile de program normale. |
Folosirea ecranului Prezentare generală I/O IMMI
| Descriere |
Ecranul cu I/O pentru IMMI oferă indicatori pentru semnalele de intrare și opțiuni pentru controlul semnalelor de ieșire. Opțiunile pentru controlul semnalelor de output sunt în mod implicit disponibile numai în modul de programare a robotului. Acest lucru poate fi reconfigurat după cum doriți în fila de configurare I/O din ecranul Instalare. La pornire, semnalele de 24V sunt în stare high. Toate celelalte semnale sunt pe low. În modul Automat, toate semnalele sunt pe high în mod implicit. |
Prezentare generală I/O IMMI
Control |
Control: Aceste semnale sunt utilizate de structurile programului pentru a controla interacțiunea dintre robot și IMM. |
|
|
| Stare |
|
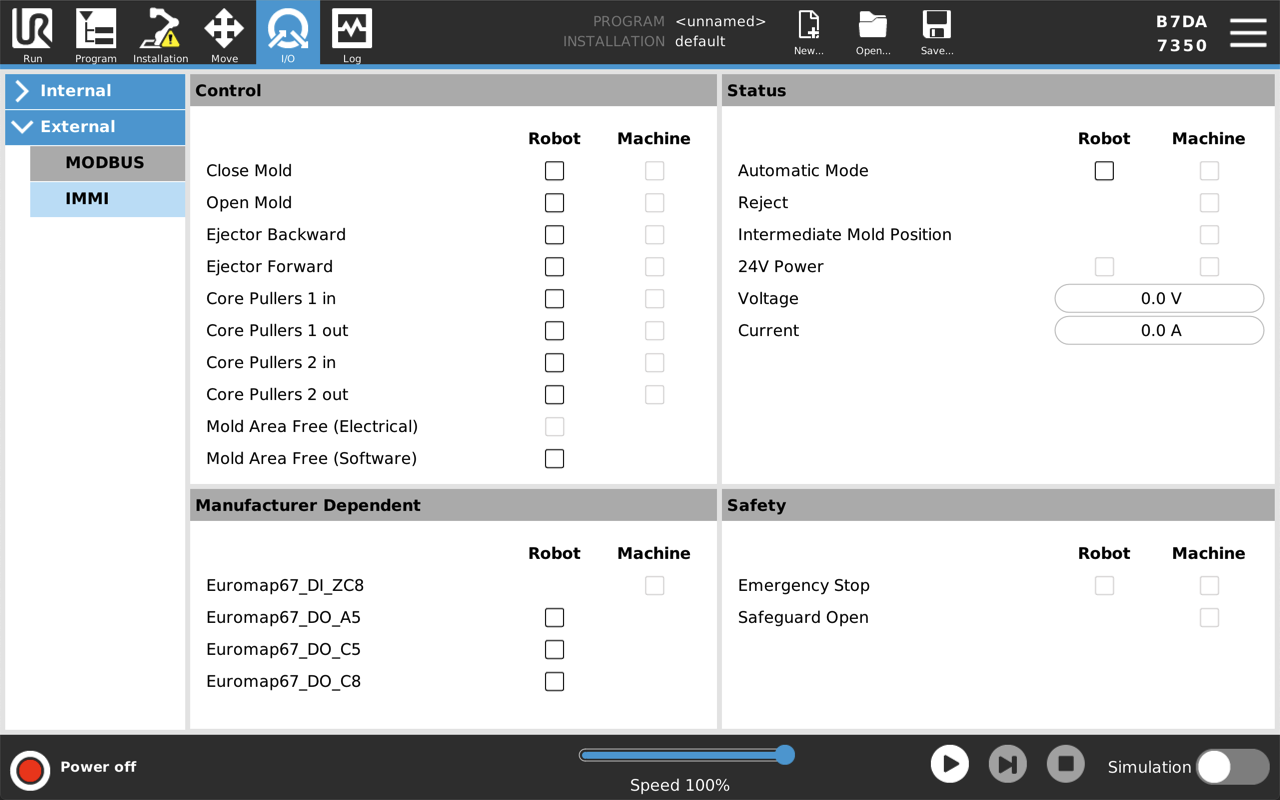
| În funcție de producător |
Aceste semnale sunt opționale, dar pot fi utilizate, după caz, în scopuri specifice de către producătorul IMM. |
Siguranță |
În coloana robot, indicatorul Oprire de urgență nu este controlabil din acest ecran. El indică doar faptul că robotul este oprit de urgență. Semnalul de oprire de urgență de la utilaj indică dacă IMM este oprit de urgență. Inputul Apărătoare deschisă afișează starea semnalelor de la „Dispozitive de siguranță” specificate în standardul EUROMAP 67. |
|
În cazul în care o structură de program nu include semnale I/O, dar acestea sunt destinate utilizării într-un program pentru robot, aveți posibilitatea să utilizați nodurile Acțiune și Așteptare descrise în secțiunea următoare. |
Cum se utilizează I/O pentru IMMI în nodurile de program obișnuite
| Așteaptă |
|
| Setare |
|
| Expresie |
Puteți accesa Editorul de expresii de la noduri multiple.
|