| Aby użyć szablonu IMMI
|
- W interfejsie PolyScope, w obszarze Nagłówek dotknij pozycji Program i wybierz pozycję IMMI.
- Select Template for the program screen to appear with the template
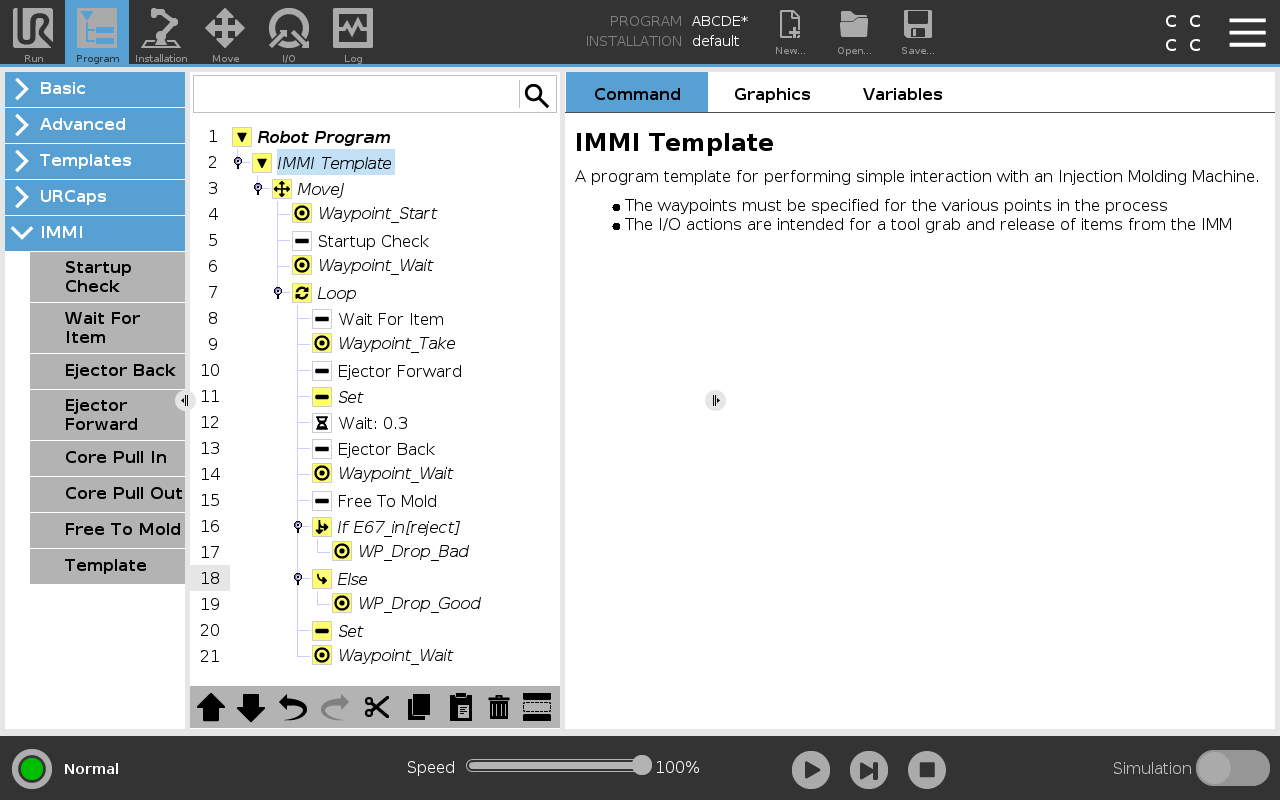
loaded. Struktura szablonu jest widoczna po lewej stronie ekranu, jak na poniższej ilustracji.
- Aby przygotować robota do przenoszenia obiektów, wybierz żądane punkty orientacyjne z następujących:
- Punkt orientacyjny: start: punkt początkowy ramienia robota przed rozpoczęciem procesu formowania wtryskowego.
- Punkt orientacyjny: czekaj: punkt oczekiwania ramienia robota.
- Punkt orientacyjny: pobierz: punkt, w którym ramię robota wyjmuje element z IMM.
- PO: Upuszczenie błędne: punkt, w którym ramię robota zwalnia odrzucony element.
- PO: Upuszczenie prawidłowe: punkt, w którym ramię robota zwalnia zaakceptowany element.
- Wybierz i dostosuj jeden z następujących węzłów, aby sterować chwytakiem:
- Ustaw: określ, kiedy narzędzie chwyta i zwalnia dany element.
- Pętla: robot jest uruchamiany tylko wówczas, gdy konieczne jest wyjęcie elementu z IMM.
- RuchJ: prędkość ruchu robota jest dostosowywana do czasu cyklu IMM.
- W węźle Ruch należy dostosować prędkość przegubu i przyspieszenie przegubu, aby dostosować je do kruchości elementu.
|