We/wy modułu IMMI w zwykłych węzłach programu
| Opis |
W tym rozdziale opisano sposób używania wejść i wyjść modułu IMMI w zwykłych węzłach programu. |
Używanie we/wy modułu IMMI — omówienie
| Opis |
Ekran we/wy IMMI zawiera wskaźniki sygnałów wejściowych oraz opcje sterowania sygnałami wyjściowymi. Opcje sterujące sygnałami wyjściowymi są domyślnie dostępne tylko w trybie programowania robota. Można to jednak ustawić według potrzeb na karcie Konfiguracja we/wy, która znajduje się na ekranie Instalacja. Przy uruchomieniu sygnały 24 V mają poziom wysoki. Wszystkie inne sygnały mają poziom niski. W trybie automatycznym wszystkie sygnały są domyślnie wysokie. |
Omówienie we/wy IMMI
Sterowanie |
Te sygnały są używane w strukturze programu do sterowania interakcją między robotem a wtryskarką. |
|
|
| Status |
|
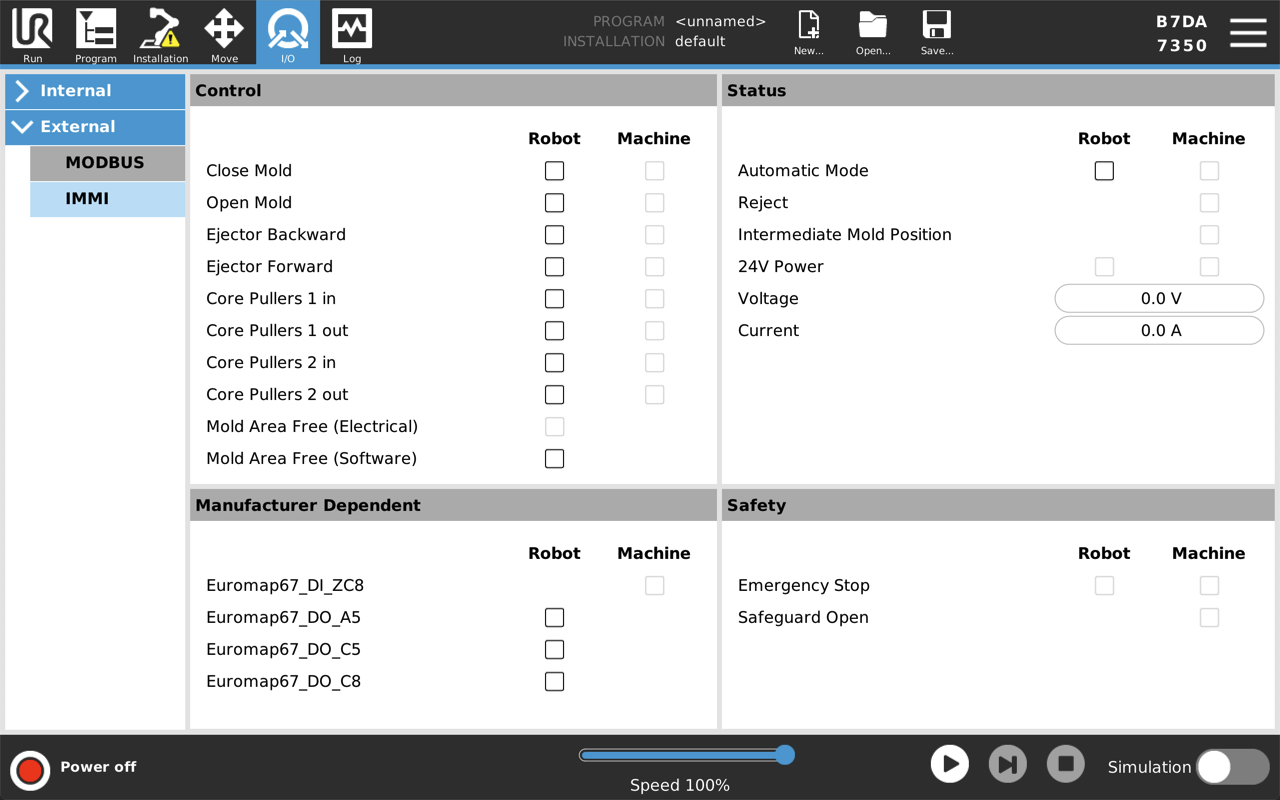
| Zależne od producenta |
Sygnały te są opcjonalne, ale w razie potrzeby producent wtryskarki może ich użyć do określonych celów. |
Bezpieczeństwo |
W kolumnie robota z tego ekranu nie można sterować wskaźnikiem zatrzymania awaryjnego. Wskazuje ona po prostu, że robot został zatrzymany awaryjnie. Sygnał zatrzymania awaryjnego z maszyny wskazuje, czy IMM została zatrzymana awaryjnie. Wejście Zabezpieczenie otwarte pokazuje stan sygnałów „urządzeń zabezpieczających” określonych w standardzie EUROMAP 67. |
|
Jeśli struktura programu nie zawiera sygnałów we/wy, ale nadal przeznaczona jest do użycia w programie robota, można użyć węzłów Działanie i Czekaj, opisanych w następnym rozdziale. |
Jak używać we/wy modułu IMMI w zwykłych węzłach programu
| Czekaj |
|
| Ustaw |
|
| Wyrażenie |
Dostęp do edytora wyrażeń można uzyskać z wielu węzłów.
|