| For at bruge IMMI-skabelonen
|
- På PolyScope, i toppanelet, skal du trykke på Program og vælge IMMI.
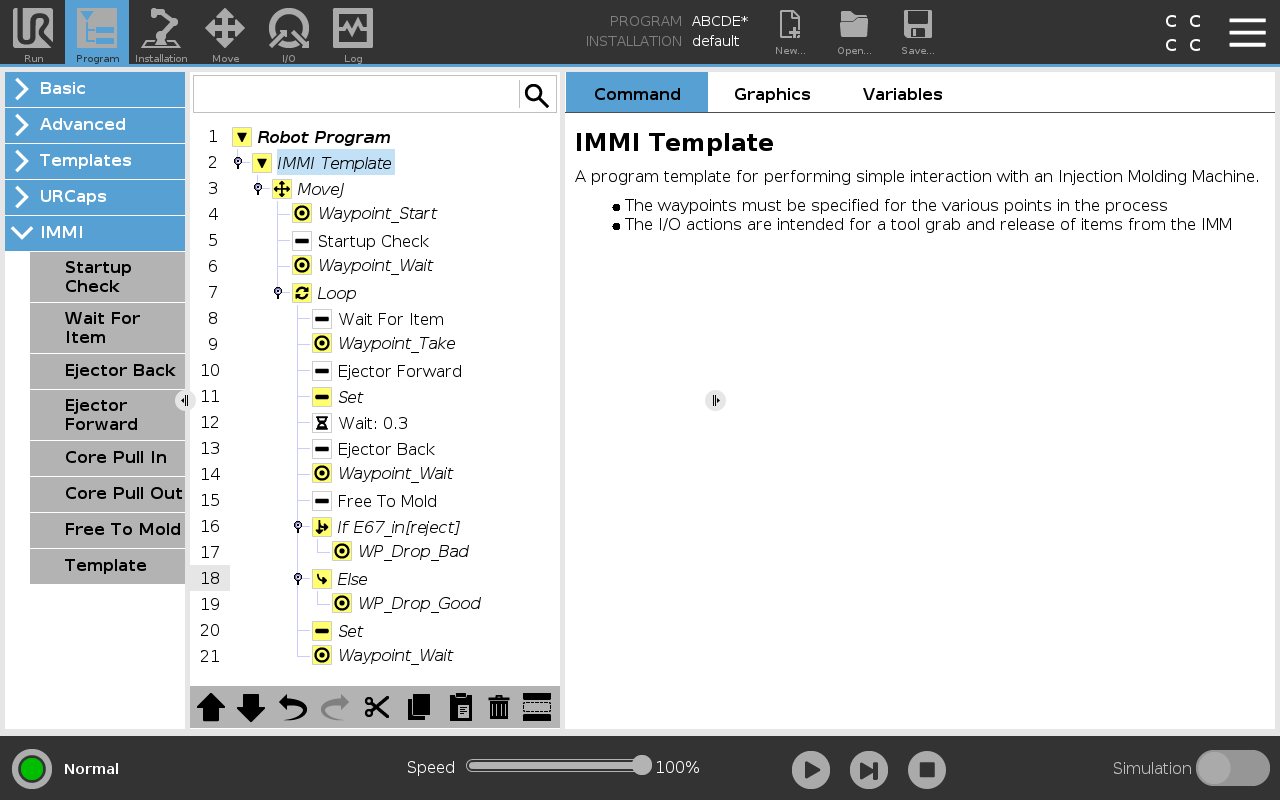
- Select Template for the program screen to appear with the template
loaded. Skabelonstrukturen er synlig på venstre side af skærmen, som illustreret nedenfor.
- For at forberede robotten til håndtering af objekter skal du vælge de ønskede viapunkter fra følgende:
- Viapunkt_Start : Startpunkt for robotarm, inden sprøjtestøbningsprocessen begynder.
- Viapunkt_Vent: Robotarms ventepunkt.
- Viapunkt_Tag: Robotarm fjerner emne fra IMM-punkt.
- WP_Slip_Dårlig: Robotarmfrigivelse afviste emnepunkt.
- WP_Slip_God: Robotarmfrigivelse accepterede emnepunkt.
- Vælg og tilpas en af følgende noder for at kontrollere griberen:
- Sæt: Bestem, hvornår værktøjet griber fat i og frigiver et emne.
- Gentag: Kør kun robotten, når et emne skal fjernes fra IMM.
- BevægJ: Juster robottens bevægelseshastighed, så den passer til IMM-cyklustiden.
- I bevæg-knuden skal du justere ledhastighed og ledacceleration for at tage hensyn til elementets skrøbelighed.
|