IMMI I/O i almindelige programknuder
| Beskrivelse |
Dette afsnit beskriver, hvordan man bruger IMMI-inputs og -outputs i almindelige programknuder. |
Brug IMMI I/O-oversigten
| Beskrivelse |
IMMI I/O-skærmen indeholder indikatorer for inputsignaler og muligheder for styring af outputsignaler. Indstillingerne til styring af outputsignalerne er som standard kun tilgængelige i robotprogrammeringstilstand. Dette kan omkonfigureres som ønsket på fanen I/O-opsætning, der findes på installationsskærmen. Ved opstart er 24V-signalerne høje. Alle andre signaler er lave. I automatisk tilstand er alle signaler høje som standard. |
IMMI I/O-oversigt
Kontrol |
Disse signaler bruges af program-strukturer til at styre interaktionen mellem robotten og IMM. |
|
|
| Status |
|
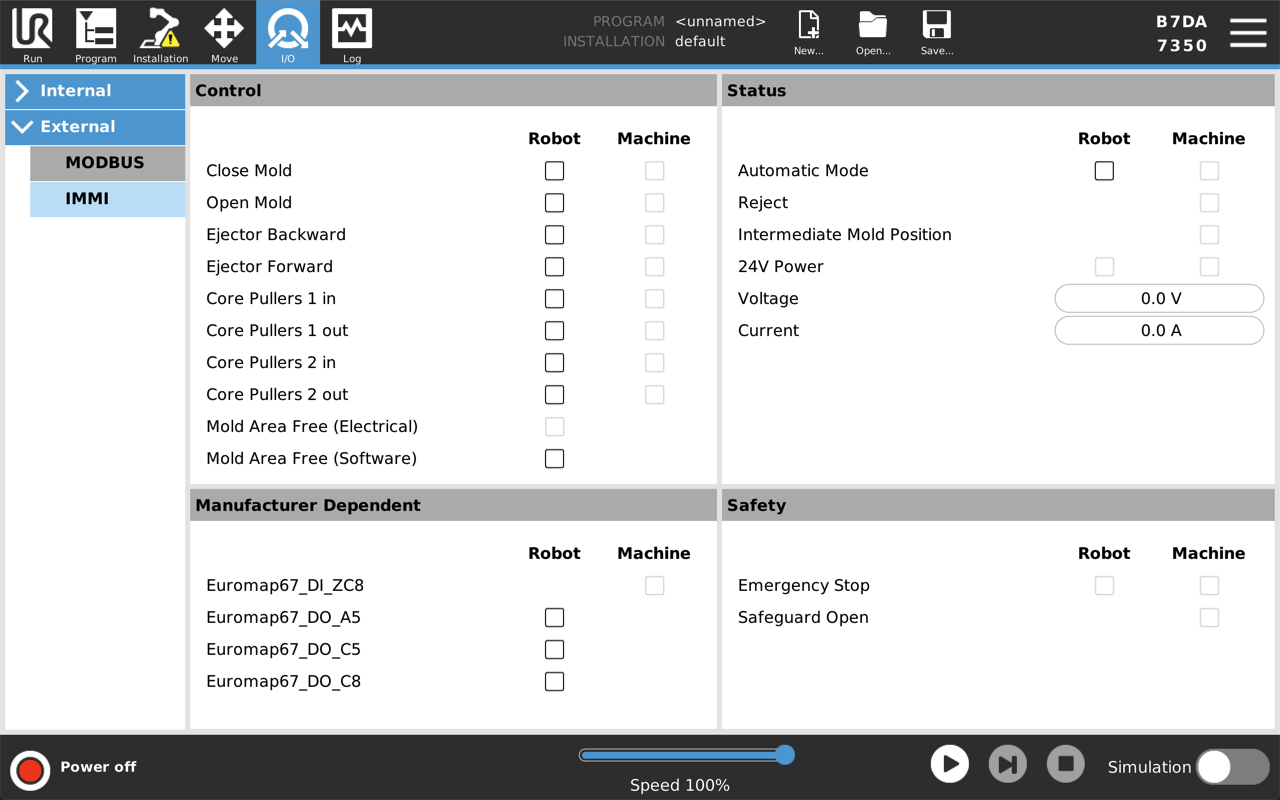
| Afhængig af producent |
Disse signaler er valgfrie, men kan efter behov bruges til specifikke formål af IMM-producenten. |
Sikkerhed |
I robotkolonnen kan nødstopindikatoren ikke styres fra denne skærm. Det indikerer blot, at robotten er nødstoppet. Nødstopsignalet fra maskinen indikerer, om IMM er nødstoppet. Værn åbent-inputtet viser status på signaler for "Sikkerhedsanordninger", specificeret i EUROMAP 67-standarden. |
|
Hvis en programstruktur ikke inkluderer I/O-signaler, men stadig er beregnet til brug i et robotprogram, kan du bruge handling- og vent-knuderne beskrevet i det følgende afsnit. |
Sådan bruges IMMI I/O i almindelige programknudepunkter
| Vent |
|
| Indstil |
|
| Udtryk |
Du kan få adgang til Udtryksredigering fra flere noder.
|