| IMMI şablonu kullanmak için
|
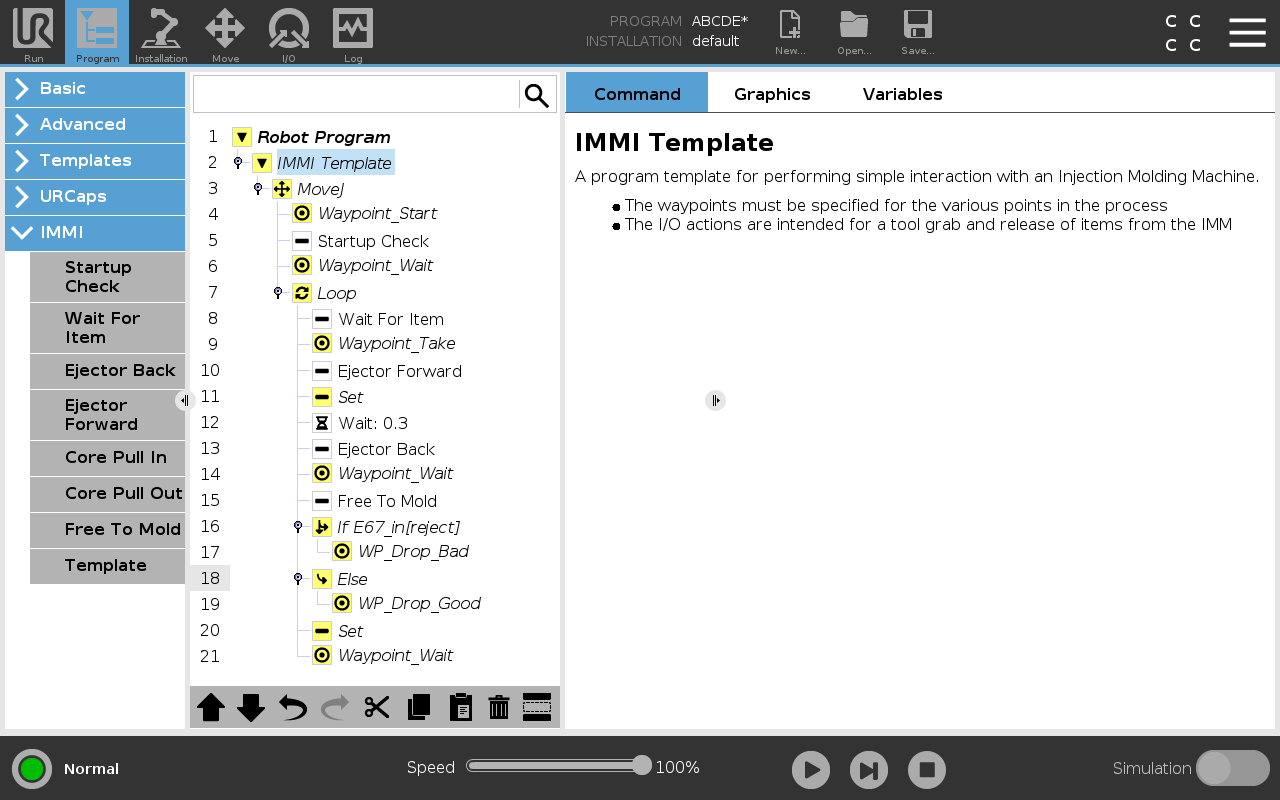
- PolyScope'ta, Üst Başlıkta, Program bölümüne dokunun ve IMMI bölümünü seçin.
- Select Template for the program screen to appear with the template
loaded. Şablon yapısı, aşağıda gösterildiği gibi ekranın sol tarafında görülebilir.
- Robotu nesneleri işlemeye hazırlamak için, istenen geçiş noktalarını aşağıdan seçin:
- Geçiş_Noktası_Başla: Enjeksiyon kalıplama süreci başlamadan önceki robot kol başlama noktası.
- Geçiş_Noktası_Bekle: Robot kolu bekleme noktası.
- Geçiş_Noktası_Al: Robot kol, öğeyi IMM noktasından kaldırır.
- GN_Düşüş_Kötü: Robot kol, reddedilen öğe noktasını serbest bırakır.
- GN_Düşüş_İyi: Robot kol, kabul edilen öğe noktasını serbest bırakır.
- Makası kontrol etmek için aşağıdaki düğümlerden birini seçin ve özelleştirin:
- Ayarla: Aletin öğeyi ne zaman kavrayacağını veya serbest bırakacağını belirleyin.
- Döngü: Yalnızca bir öğenin IMM'den kaldırılması gerektiğinde robotu çalıştırın.
- Hareket EttirJ: IMM döngü zamanına uydurmak için robot hareket hızını ayarlayın.
- Hareket Ettir düğümünde, öğe kırılganlığına göre Eklem Hızını ve Eklem İvmesini ayarlayın.
|