Normal Program Düğümlerinde IMMI G/Ç'si
| Açıklama |
Bu bölüm, normal program düğümlerinde IMMI giriş ve çıkışlarının nasıl kullanılacağını açıklar. |
IMMI G/Ç Kullanımına Genel Bakış
| Açıklama |
IMMI G/Ç ekranı, giriş sinyalleri için göstergeler ve çıkış sinyallerini denetlemek için seçenekler sunar. Çıkış sinyallerini denetleme seçenekleri varsayılan olarak sadece robot programlama modunda kullanılabilir. Bu, Kurulum ekranında bulunan G/Ç ayarları sekmesinde istediğiniz şekilde yeniden yapılandırılabilir. Çalıştırmada, 24V sinyalleri yüksektir. Diğer tüm sinyaller düşüktür. Otomatik modda, tüm sinyaller varsayılan olarak yüksektir. |
IMMI G/Ç Genel Görünümü
Kontrol |
Bu sinyaller, robot ile IMM arasındaki etkileşimi denetlemek için program yapıları tarafından kullanılır. |
|
|
| Durum |
|
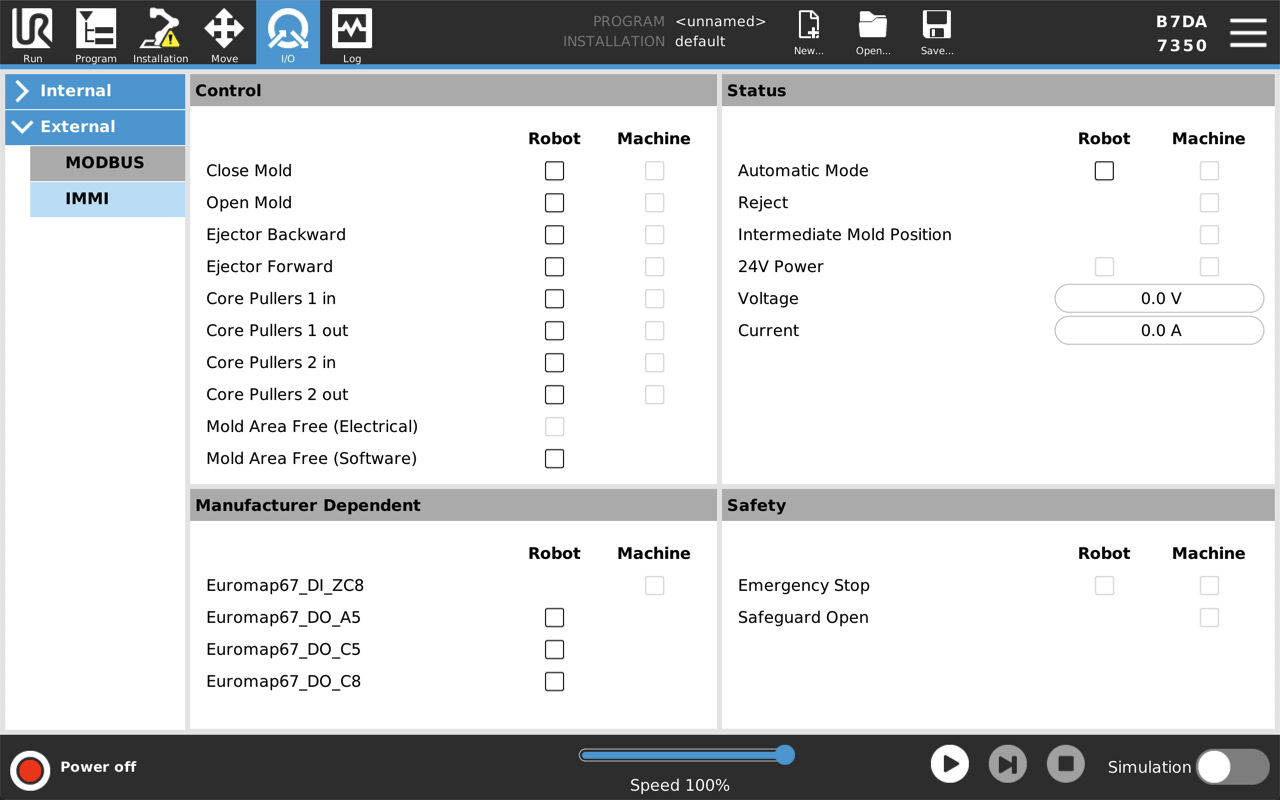
| Üreticiye Bağlı |
Bu sinyaller isteğe bağlıdır ancak IMM üreticisinin belirli amaçlarına göre ihtiyaca göre de kullanılabilir. |
Güvenlik |
Robot sütununda, Acil Durdurma göstergesi bu ekrandan kontrol edilemez. Bu sadece robotun acil durdurma durumunda olduğunu gösterir. Makineden gelen acil durum duruş sinyali, IMM'nin acil durdurulup durdurulmadığını gösterir. Koruma Açık girişi, EUROMAP 67 standardında belirtilen "Güvenlik cihazları" sinyallerinin durumunu gösterir. |
|
Program yapısı G/Ç sinyalleri içermiyorsa ama yine de bir robot programında kullanılması amaçlanıyorsa, aşağıdaki bölümde açıklanan Eylem ve Bekle düğümlerini kullanabilirsiniz. |
Normal Program Düğümlerinde IMMI G/Ç Nasıl Kullanılır?
| Bekle |
|
| Ayarla |
|
| İfade |
Birçok düğüm için İfade Düzenleyicisi'ne erişebilirsiniz.
|