| Navodila za uporabo predloge IMMI
|
- Na vmesniku PolyScope, v Glavi se dotaknite možnosti Program in izberite IMMI.
- Select Template for the program screen to appear with the template
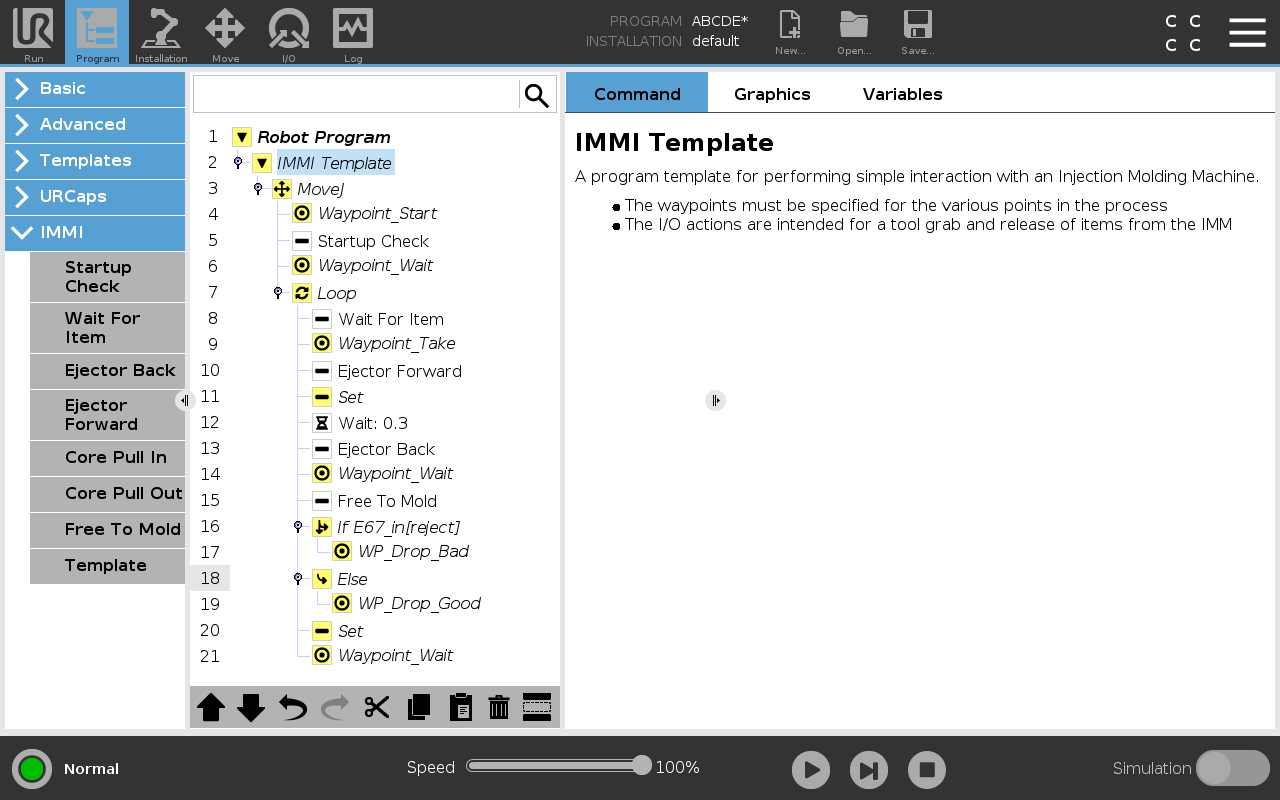
loaded. Struktura predloge bo nato vidna na levi strani zaslona, kot je prikazano spodaj.
- Če želite pripraviti robota za upravljanje s predmeti, izberite želene smerne točke spodaj:
- Začetna_smerna_točka: Začetka točka roke robota pred začetkom vlivanja v kalupe.
- Waypoint_Wait: Točka čakanja roke robota.
- Waypoint_Take: Roba robota odstrani kos iz točke IMM.
- WP_Drop_Bad: Roka robota sprosti zavrnjen kos na tej točki.
- WP_Drop_Good:Roka robota sprosti sprejemljivi kos na tej točki.
- Za upravljanje orodja za prijemanje izberite in prilagodite eno od naslednjih vozlišč:
- Nastavi: Določanje mesta, kjer orodje prime in izpusti predmet.
- Ponovitev: Zaženite robota samo v primeru, ko želite odstraniti predmet iz IMM.
- PremikJ: Nastavite hitrost premikanja robota skladno s časom ciklusa IMM.
- V vozlišču za premik v skladu z lomljivostjo predmeta nastavite hitrost členov in pospeševanje členov.
|