V/I IMMI v običajnih programskih vozliščih
| Opis |
V tem razdelku je opisana uporaba vhodov in izhodov IMMI v običajnih programskih vozliščih. |
Pregled uporabe V/I IMMI
| Opis |
Zaslon IMMI V/I prikazuje kazalnike za vhodne signale in možnosti za krmiljenje izhodnih signalov. Možnosti za krmiljenje izhodnih signalov so s privzetimi nastavitvami na voljo samo v načinu programiranja robota. To nastavitev lahko poljubno spreminjate na zavihku Nastavitev V/I, na zaslonu za Namestitev. Ob zagonu so signali 24 V visoki. Vsi drugi signali so nizki. V Samodejnem načinu so vsi signali privzeto visoki. |
Pregled V/I IMMI
Krmiljenje |
Te signale uporabljajo strukture programa za nadzor komunikacije med robotom in IMM. |
|
|
| Stanje |
|
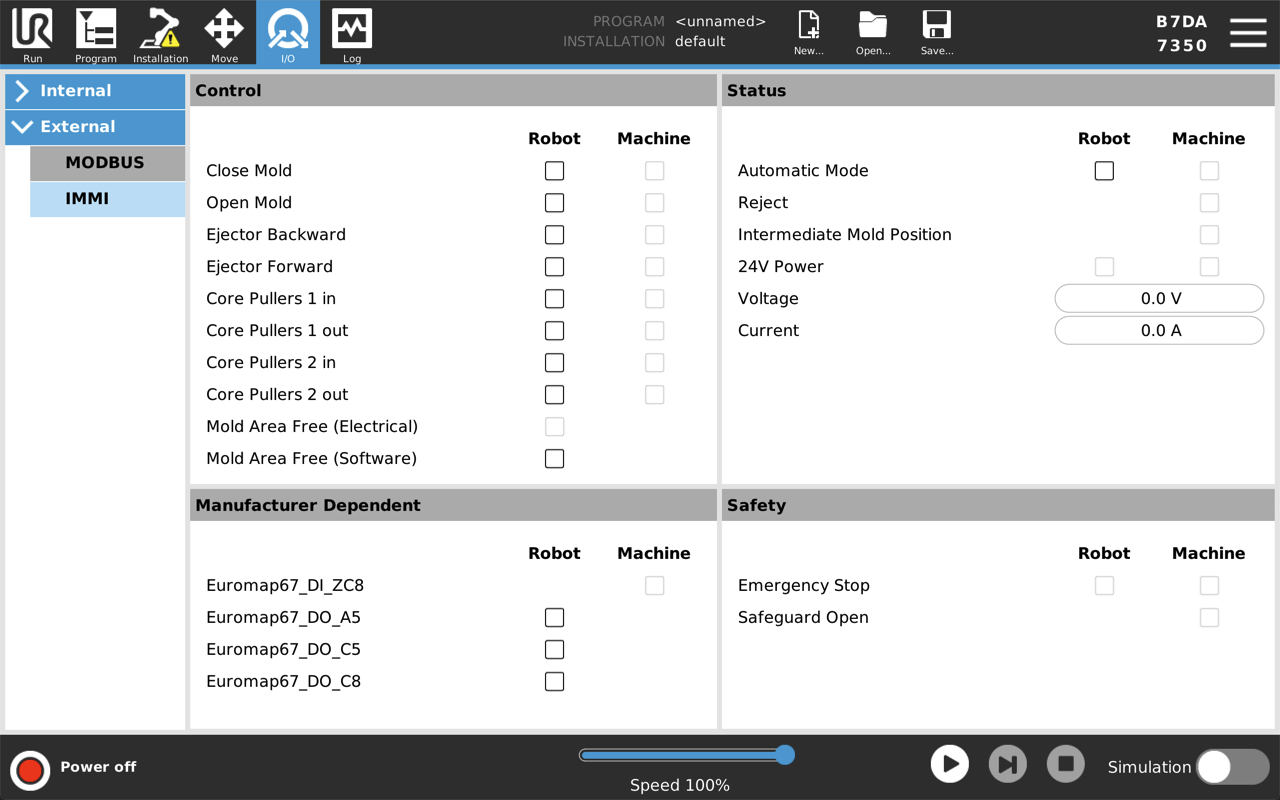
| Odvisno od proizvajalca |
Ti signali so izbirni in jih je mogoče po potrebi uporabiti za določene namene proizvajalca IMM. |
Varnost |
Kazalnika Zaustavitev v sili v stolpcu robot ni mogoče upravljati na tem zaslonu. Označuje, da je bil robot zaustavljen v sili. Signal za zaustavitev v sili iz stroja označuje zaustavitev stroja IMM v sili. Vhod Odprt preventivni element prikazuje stanje signalov »Varnostnih naprav«, določenih v standardu EUROMAP 67. |
|
Če struktura programa ne vsebuje signalov V/I, a je vseeno namenjena za uporabo v programu robota, lahko uporabite vozlišči Dejanje in Čakaj po spodaj opisanem postopku. |
Uporaba V/I IMMI v običajnih programskih vozliščih
| Počakaj |
|
| Nastavi |
|
| Izraz |
Do urejevalnika izrazov lahko dostopate z več vozlišč.
|