IMMI I/O v běžných programových uzlech
| Popis |
Tato kapitola popisuje, jak používat vstupy a výstupy IMMI v běžných programových uzlech. |
Přehled použití IMMI I/O
| Popis |
Obrazovka se vstupy/výstupy IMMI zobrazuje indikátory vstupních signálů a možnosti ovládání výstupních signálů. Možnosti ovládání výstupních signálů jsou ve výchozím nastavení k dispozici pouze v režimu programování robota. To lze podle potřeby překonfigurovat na kartě Nastavení I/O na obrazovce Instalace. Při spuštění jsou signály 24V vysoké. Všechny ostatní signály jsou nízké. V automatickém režimu jsou všechny signály standardně vysoké. |
Přehled IMMI I/O
Ovládání |
Tyto signály jsou používány programovými strukturami k řízení interakce mezi robotem a IMM. |
|
|
| Stav |
|
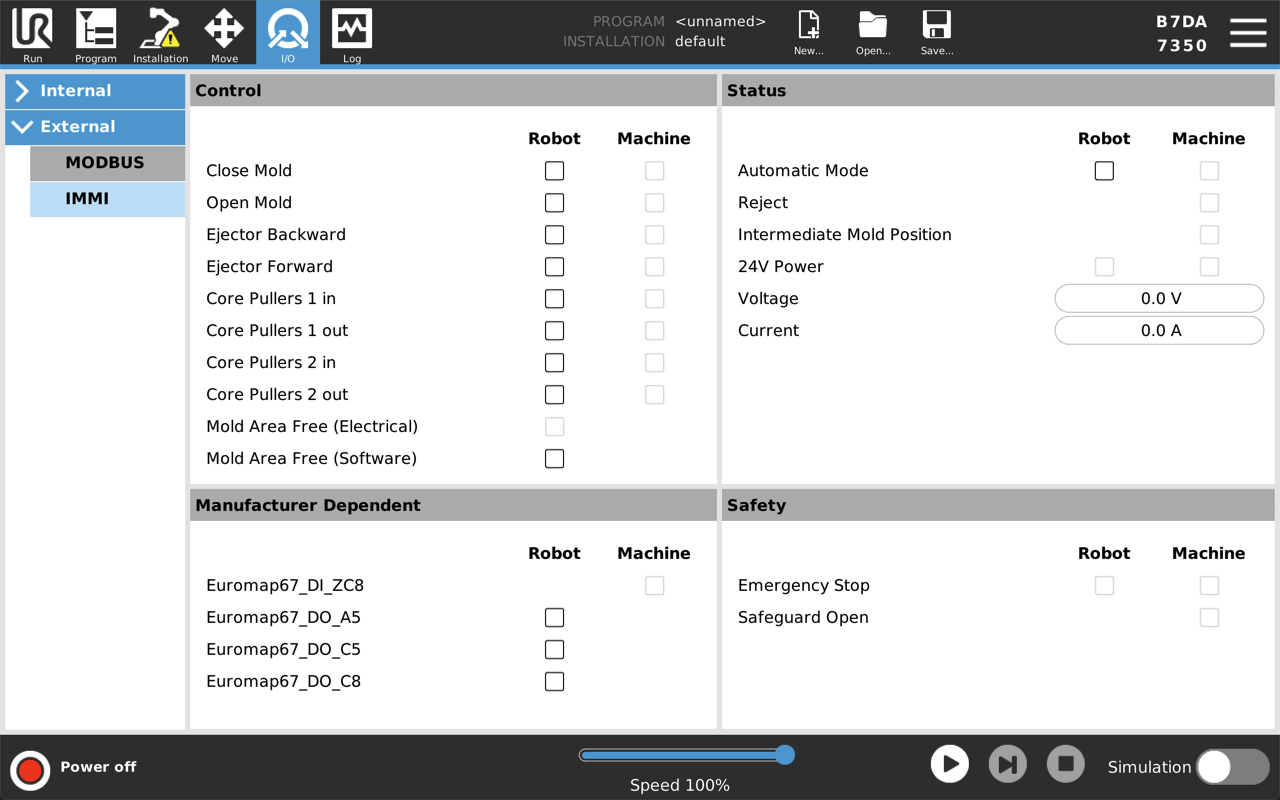
| Závisí na výrobci |
Tyto signály jsou volitelné, ale podle potřeby je může výrobce IMM použít pro konkrétní účely. |
Bezpečnost |
Ve sloupku robota nelze z této obrazovky ovládat indikátor nouzového zastavení. To jednoduše signalizuje, že robot je nouzově zastaven. Signál nouzového zastavení ze stroje signalizuje, zda došlo k nouzovému zastavení IMM. Vstup Bezpečnostní kryt otevřen informuje o stavu signálů „Bezpečnostních zařízení“ určených v normě pro rozhraní EUROMAP 67. |
|
Pokud programová struktura neobsahuje signály ze vstupů/výstupů, ale je plánováno jejich použití v programu robota, můžete použít uzly Akce a Čekat popsané v následující kapitole. |
Použití IMMI I/O v běžných programových uzlech
| Čekat |
|
| Nastavit |
|
| Výraz |
K editoru výrazů se dostanete z více uzlů.
|