Mounting the Robot Arms to the Calibration Horse
| Description |
When mounting the arms for calibration, keep the following in mind:
|
| To mount each robot arm in SW |
|
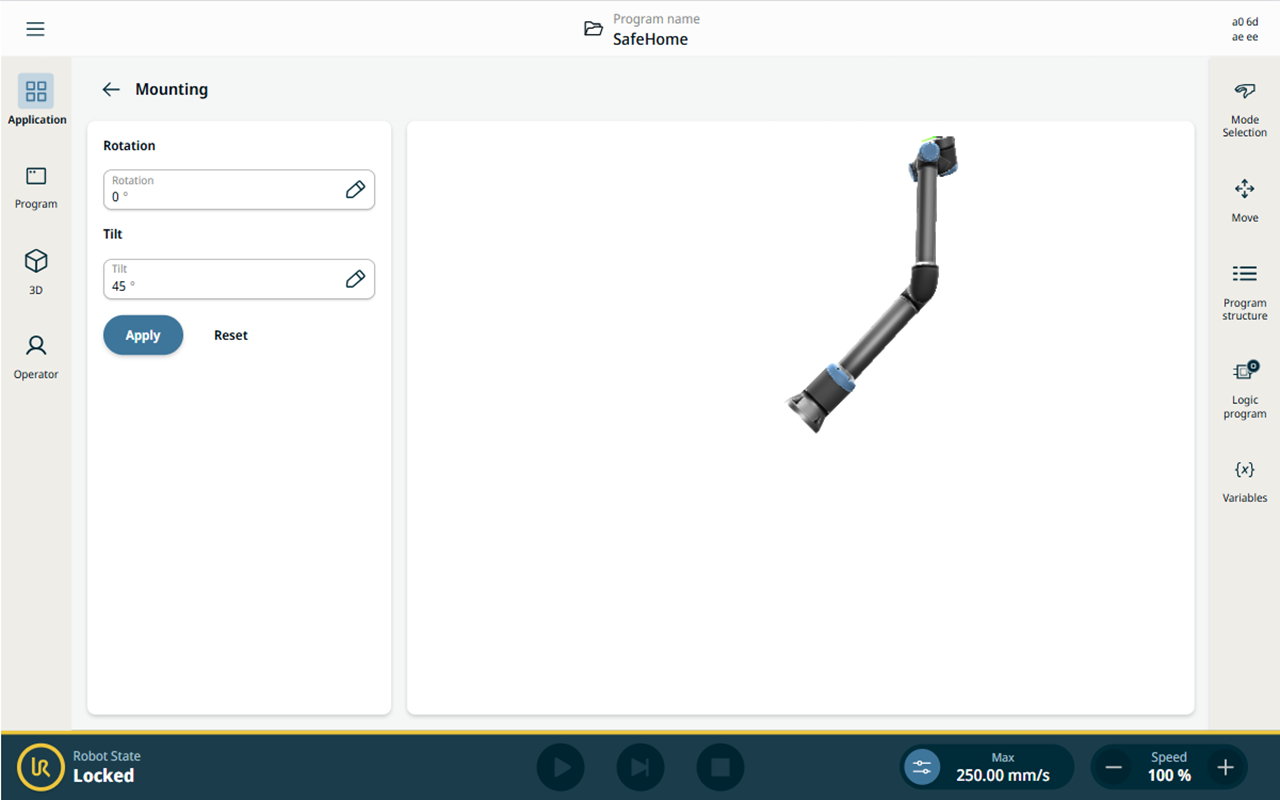
| To configure the mounting software |
|
|
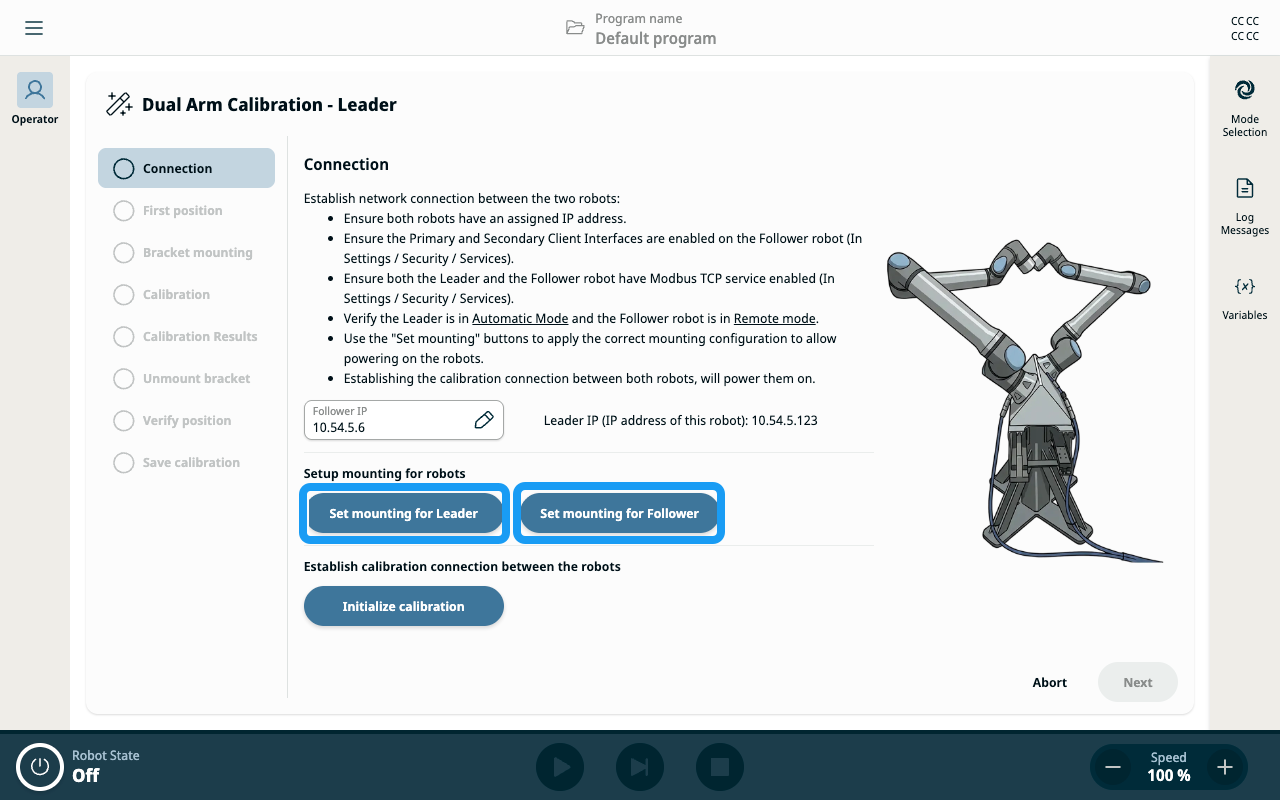
Set Mounting during calibration |
You can set the mounting from the calibration flow. The mounting parameters for both the Leader and Follower robots can also be configured by tapping the two Set Mounting buttons in the Connection and Initialization step of the calibration.
|