| Använda IMMI-mallen
|
- På PolyScope, i rubriken, trycker du på Program och väljer IMMI.
- Select Template for the program screen to appear with the template
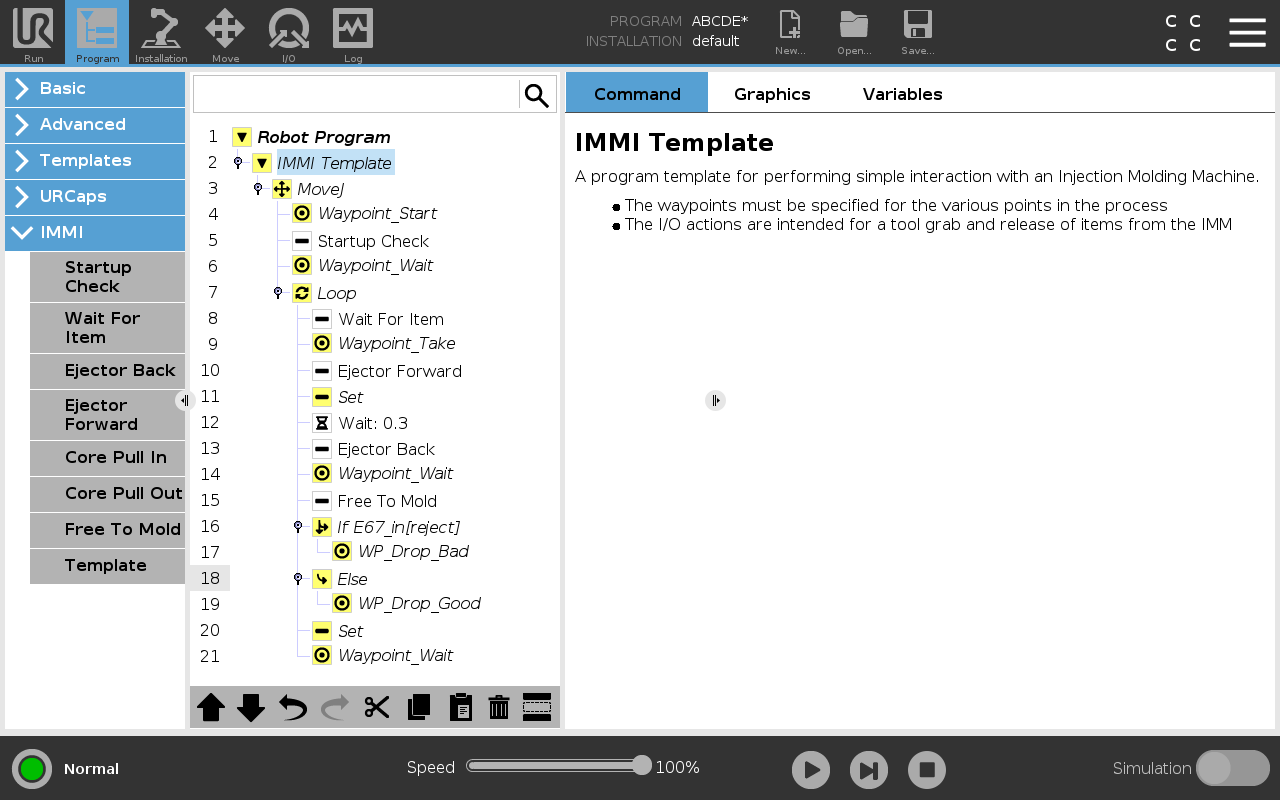
loaded. Mallstrukturen är synlig på vänster sida av skärmen, vilket visas nedanför.
- För att förbereda roboten att hantera föremål kan du välja önskade vägpunkter från följande:
- Vägpunkt_Start: Robotarmens startpunkt innan injektionsgjutningsprocessen börjar.
- Wägpunkt_Vänta: Robotarmens väntpunkt.
- Vägpunkt_Ta: Robotarmen tar bort objektet från IMM-punkten.
- WP_Släpp_Dåligt: Robotarmen släpper avvisad objektspunkt.
- WP_Släpp_Bra: Robotarmen släpper accepterad objektspunkt.
- Välj och anpassa en av följande noder för att kontrollera gripdonet:
- Ställ in: Bestäm när verktyget greppar och släpper ett föremål.
- Loop: Kör roboten endast när ett objekt måste tas bort från IMM.
- FlyttaLed: Justera robotens rörelsehastighet för att passa in i IMM-cykeltiden.
- I noden Flytta justerar du ledhastighet och ledacceleration som passar föremålets ömtålighet.
|