IMMI I/O i normala programnoder
| Beskrivning |
Detta avsnitt beskriver hur du använder IMMI-ingångar och -utgångar i normala programnoder. |
Använda IMMI I/O-översikten
| Beskrivning |
IMMI I/O-skärmen erbjuder indikatorer för ingångssignaler och alternativ för att kontrollera utgångssignalerna. Alternativen för att styra utgångssignaler är som standard bara tillgängliga i robotprogrammeringsläge. Detta kan dock omkonfigureras efter behov på fliken I/O-inställning på skärmen Installation. Vid uppstart är 24V-signalerna höga. Alla andra signaler är låga. I automatiskt läge är alla signaler höga som standard. |
IMMI I/O-översikt
Kontroll |
Dessa signaler används av programstrukturer för att kontrollera interaktionen mellan roboten och IMM. |
|
|
| Status |
|
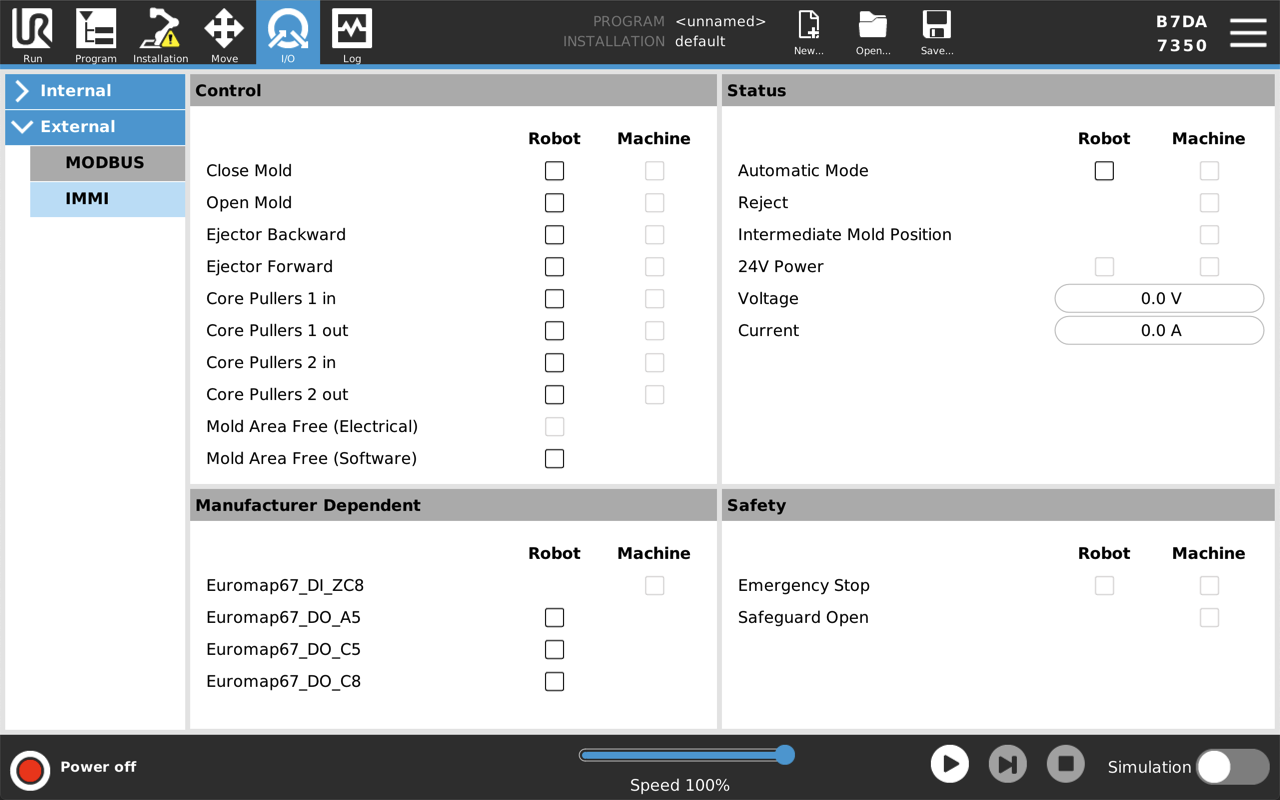
| Tillverkarberoende |
Dessa signaler är valfria men kan användas, efter behov, i specifika syften enligt IMM-tillverkaren. |
Säkerhet |
I robotkolumnen kan nödstoppsindikatorn inte styras från den här skärmen. Det indikerar helt enkelt att roboten är nödstoppad. Nödstoppssignalen från maskinen anger om IMM nödstoppats. Ingången Skyddsanordning öppen visar tillståndet för de "Skyddsstopp-enheter" som specificeras i EUROMAP 67-standarden. |
|
Om en programstruktur inte inkluderar I/O-signaler, men fortfarande är avsedd för användning i ett robotprogram, kan du använda noderna Åtgärd och Vänta som beskrivs i följande avsnitt. |
Så här använder du IMMI I/O i normala programnoder
| Vänta |
|
| Ställ in |
|
| Uttryck |
Du kan få åtkomst till Uttrycksredigeraren från flera noder.
|