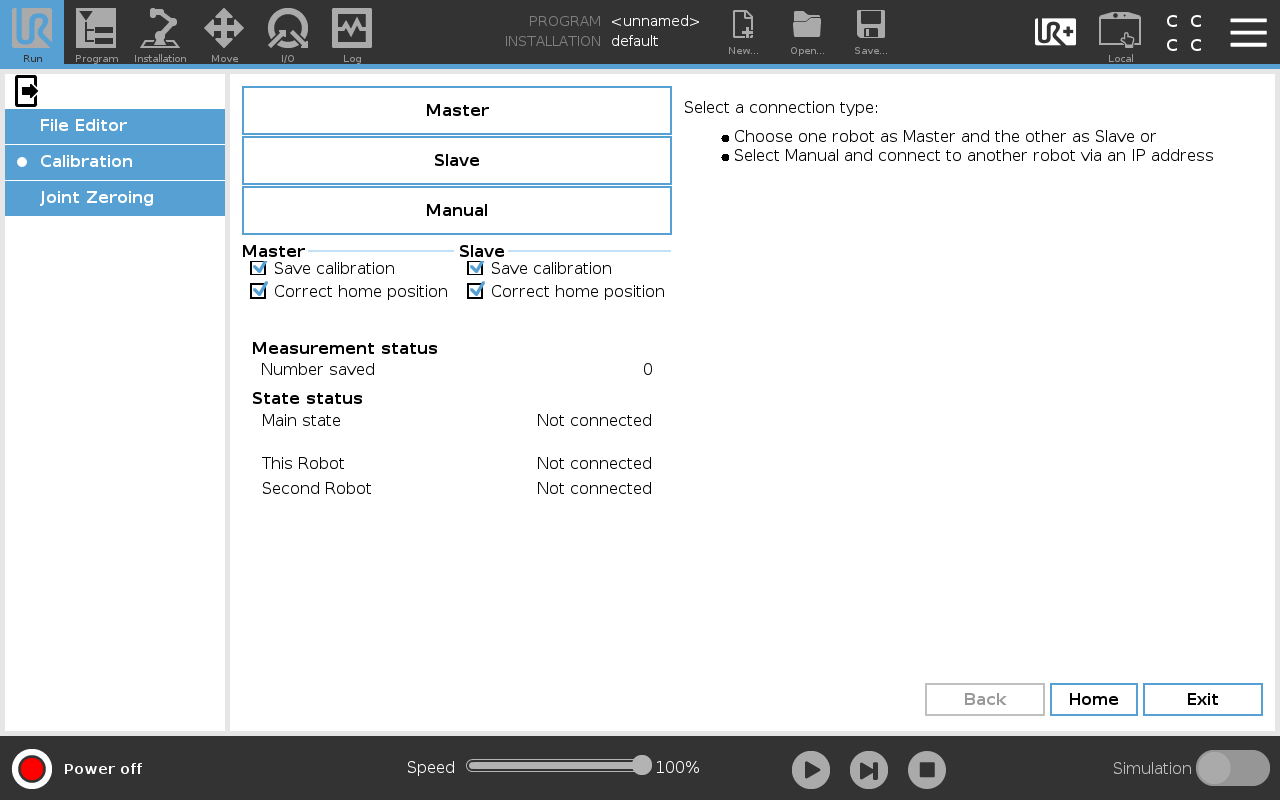
Method 2: Master/Slave Connection
| Description |
Use this method only for robots connected directly with a single network cable. The network communication between the Master robot and the Slave robot can break down, causing the calibration to stop.
The Master / Slave network connection uses self-assigned IP addresses, which can interfere with local area network devices. |
| Connecting the Master / Slave network (Method 2) |
Define the network connection types as listed in the following table:
|
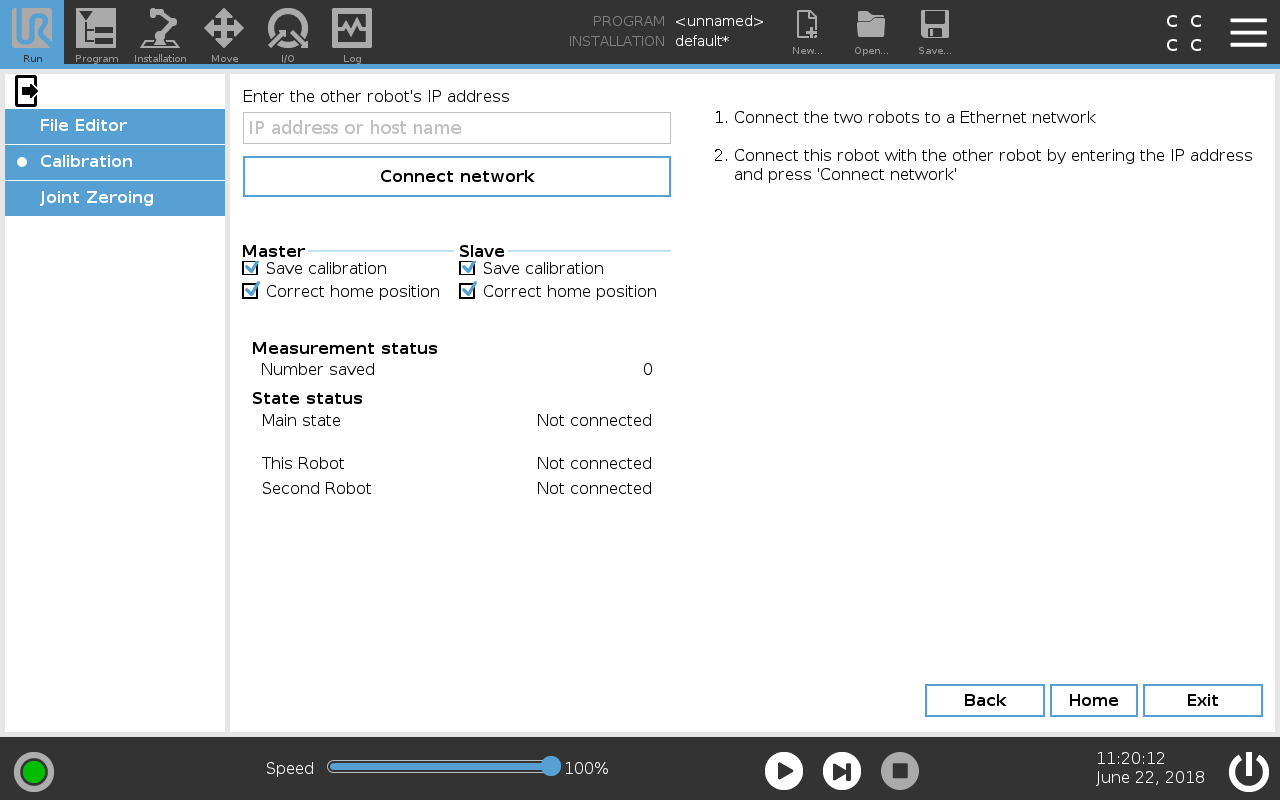
| To connect the Master / Slave network |
Verify that all installed services are enabled, such as Modbus. If they are disabled, the connection will fail.
|
|
|
|